

A reconfigurable rope-driven hybrid variable stiffness household service manipulator
A variable stiffness and rope-driven technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult real-time adjustment of variable stiffness, bulky arms, and inflexible movements, etc., to achieve increased work space and variable stiffness adjustment range, extend the workspace, and avoid the effects of kinematic coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0021] The invention proposes a reconfigurable rope-driven hybrid variable-stiffness household service robot arm.
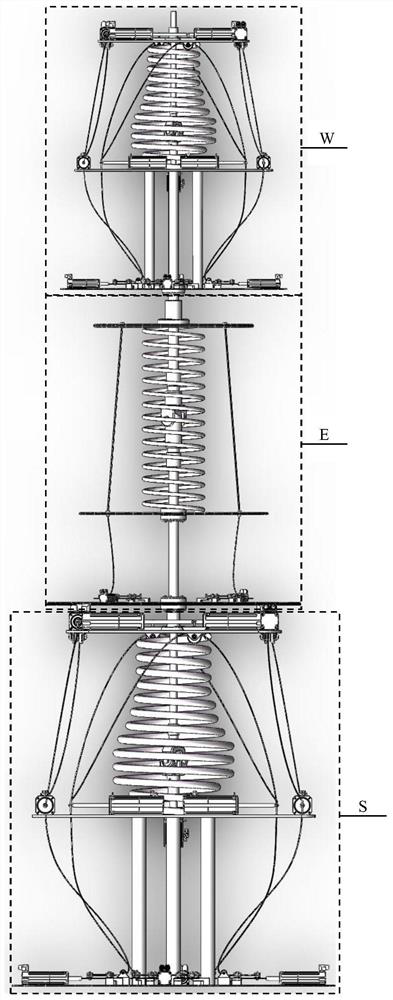
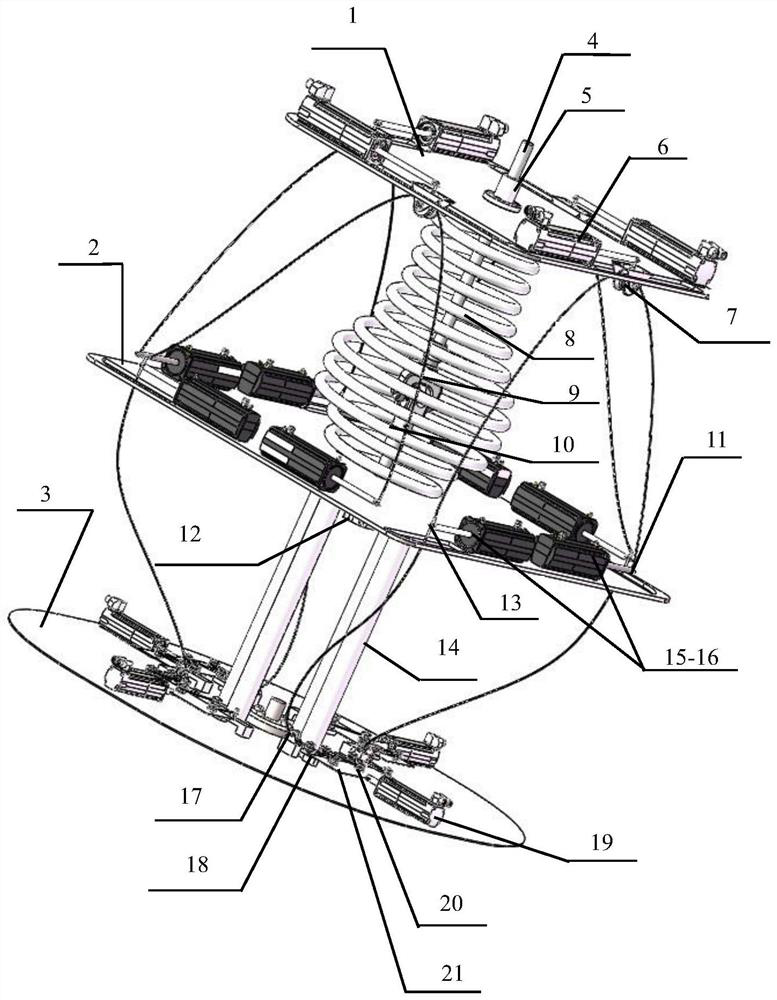
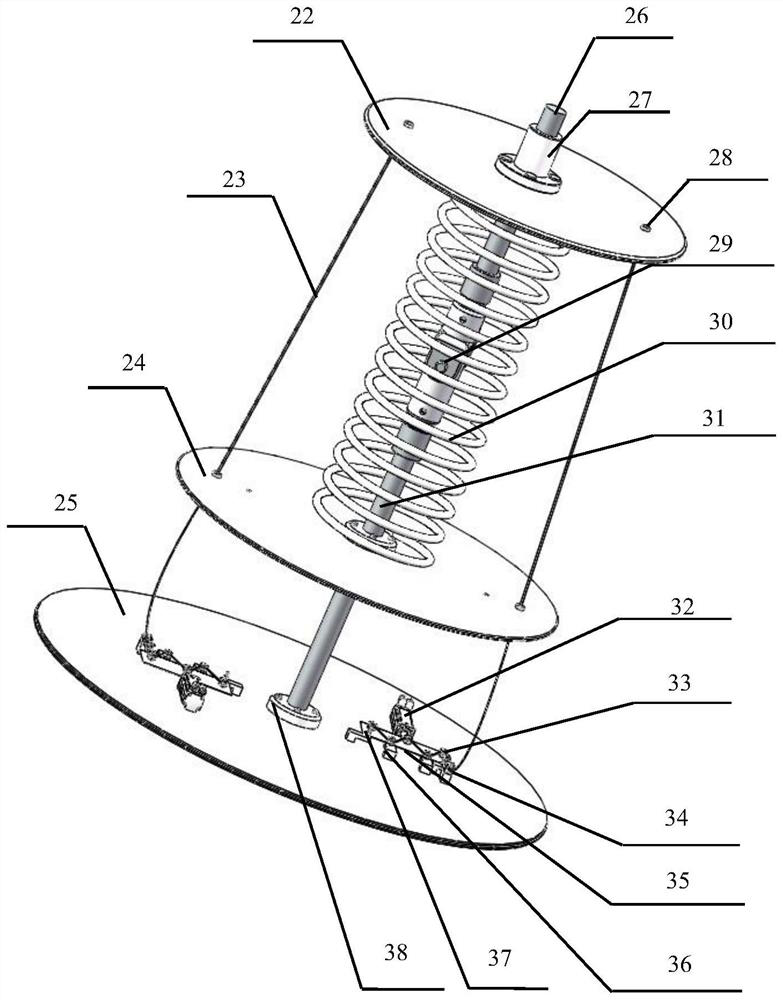
[0022] Such as figure 1 As shown, the reconfigurable rope-driven hybrid variable stiffness home service robot arm of the embodiment of the present invention includes a shoulder joint S, an elbow joint E, and a wrist joint W, wherein the elbow joint E of this embodiment is a joint with 2 degrees of freedom, and The shoulder joint S and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More