

Robot target image capturing method
A target image and robot technology, which is applied in the field of robot target image capture, can solve problems such as easy failure, complex mechanical fingers with dozens of joints, and difficult fingers, and achieve the effect of ensuring stability, convenient image processing, and accurate results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
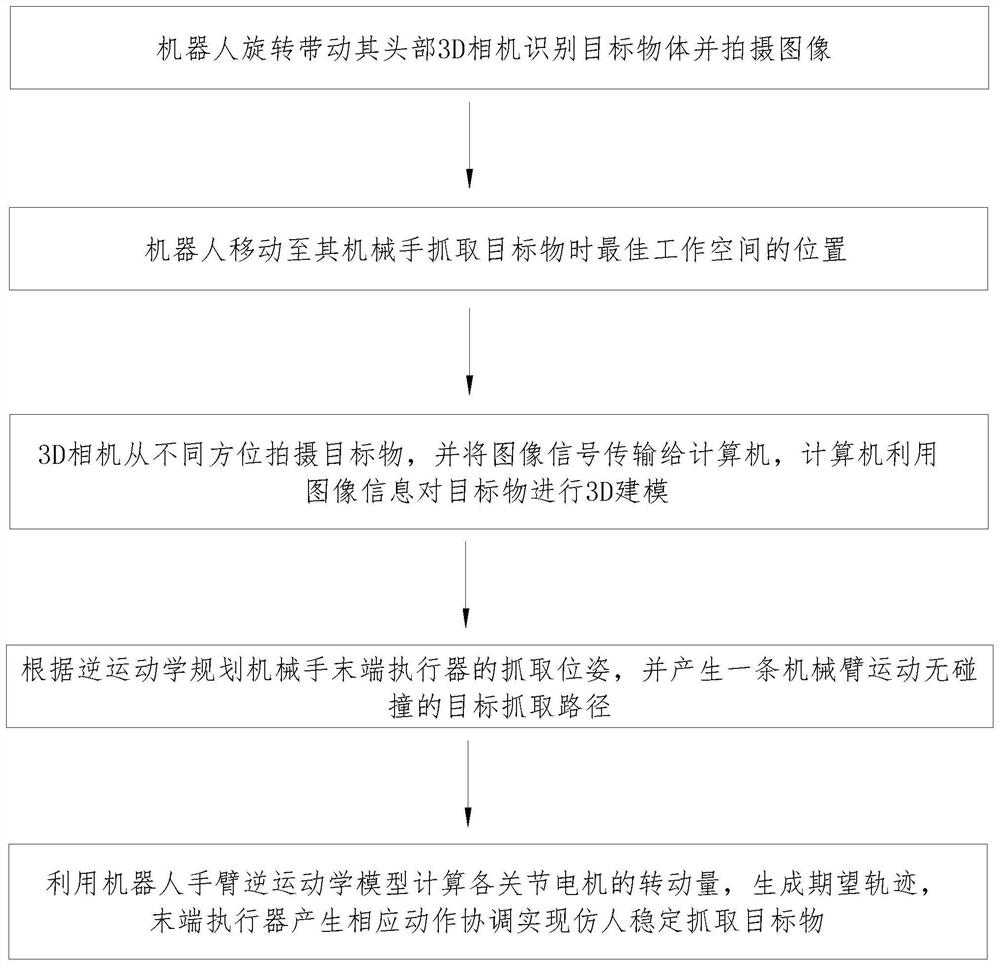
[0031] Such as figure 1 As shown in the present invention, a robot target image capture method proposed, the robot rotates to drive its head 3D camera to identify the target object and take an image;
[0032] The robot moves to the position of the best working space when its manipulator grabs the target;
[0033] The 3D camera shoots the target from different directions, and transmits the image signal to the computer, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More