

Unmanned vehicle, terminal point lateral steady-state control method thereof and electronic equipment
An unmanned vehicle, steady-state control technology, applied in the direction of the control device, etc., can solve the problems of preview distance attenuation, affecting the steady-state performance of parking at the end point, the number of preview points, and the lateral control oscillation of the end point attachment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
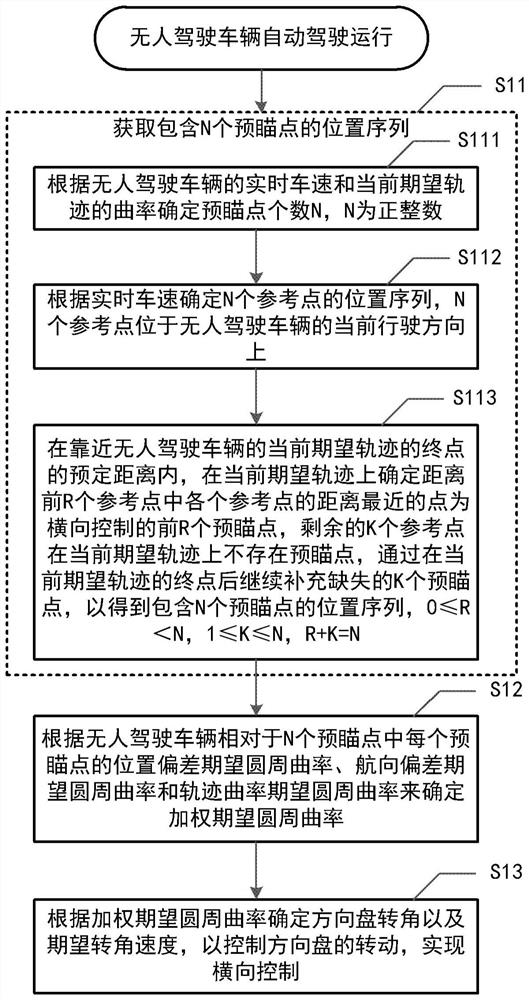
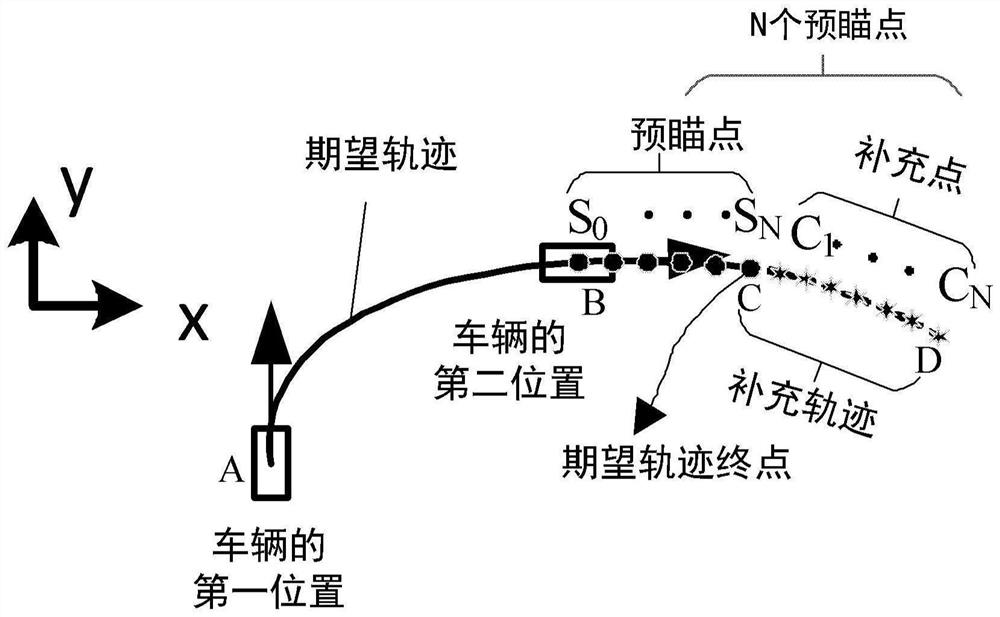
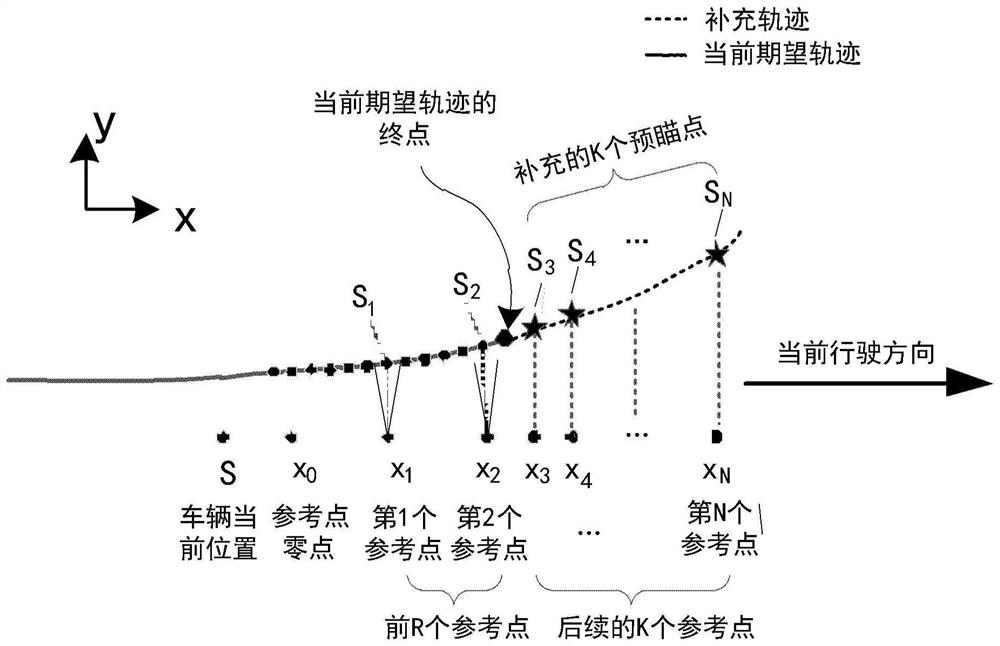
[0068] Embodiments of the present disclosure provide an unmanned vehicle and its endpoint lateral stability control method, and electronic equipment. By compensating the preview point after the endpoint of the desired trajectory, the moment before reaching the endpoint can be based on N previews Stable lateral control at the point, which solves the stability problem of lateral control at the end point, and improves the vehicle control performance.
[0069] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present disclosure will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0070] The first exemplary embodiment of the present disclosure provides a terminal lateral stability control method of an unmanned vehicle.
[0071] figure 1 It is a flow chart of a terminal lateral stability control method of an unmanned vehicle according to an embodime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More