

Fruit picking sequence planning method based on visual selection attention mechanism
An attention mechanism and vision technology, applied in picking machines, harvesters, computer parts, etc., can solve problems such as high labor costs, increased burden, and aggravated robot uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
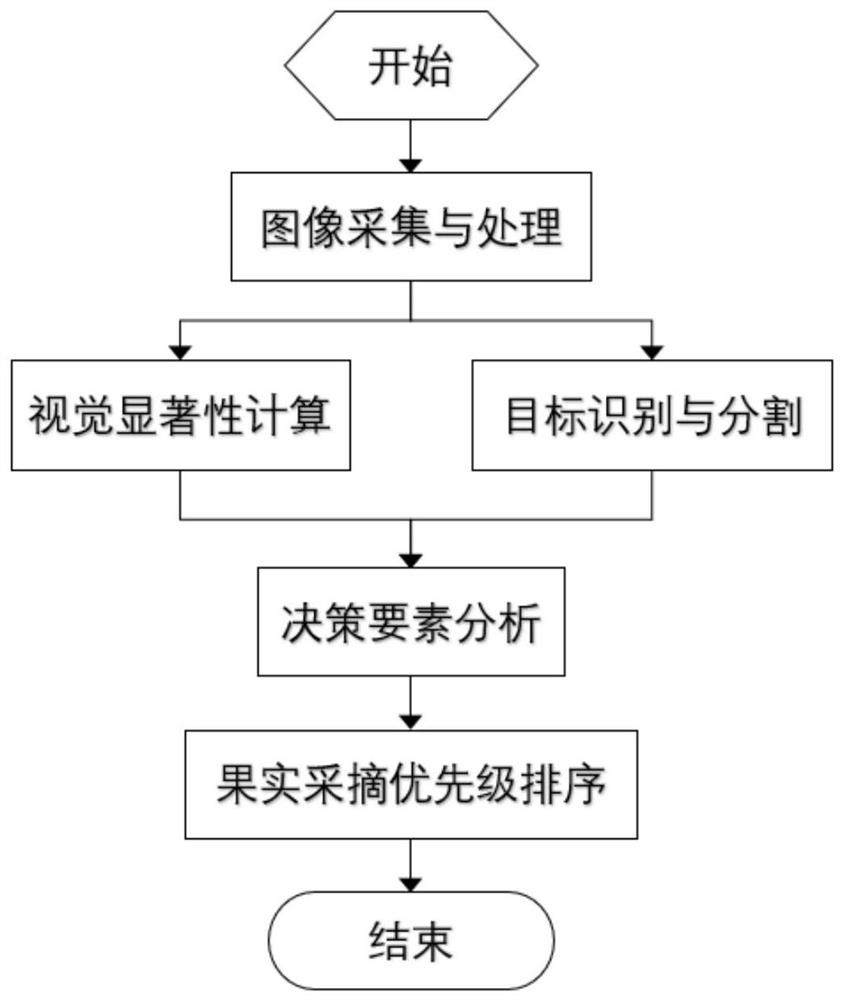
[0076] Such as figure 1 Shown is the operation flow of the fruit picking sequence planning method based on the visual selection and attention mechanism of the present invention.
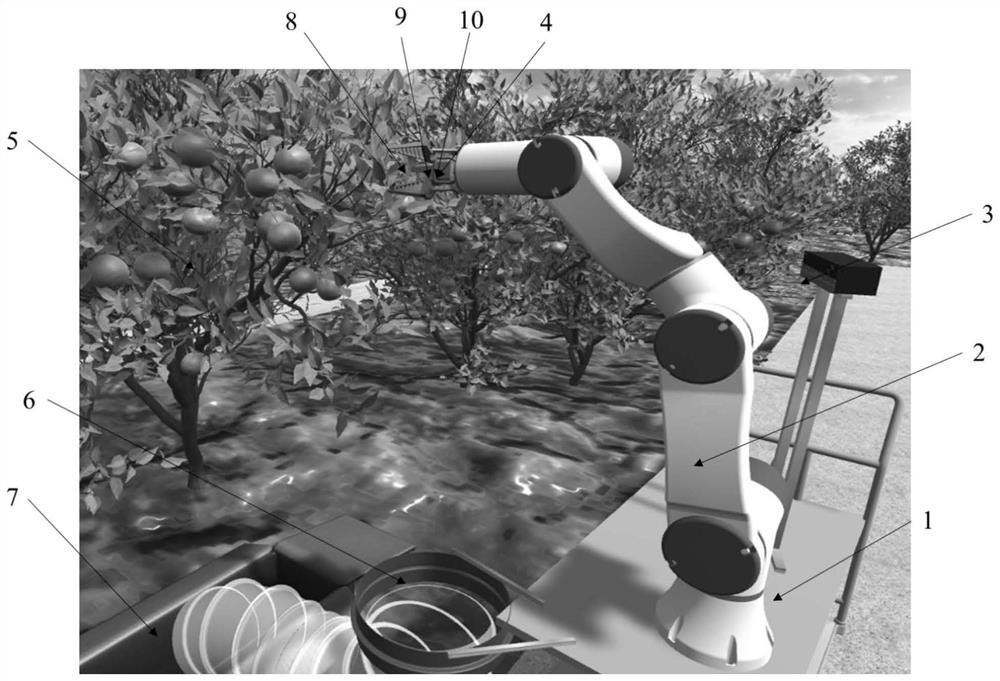
[0077] Such as figure 2 As shown, the fruit picking robot includes a liftable platform 1 , a six-degree-of-freedom robotic arm 2 and a Kinect v2 camera 3 . The picking robot is the elfin series produced by Han's Robot Company, and it is placed in front of the fruit tree 5. The Kinectv2 camera is installed on the left or right side of the center line of the picking robot base, the center of the camera and the center of the picking robot base are kept on the same line, the viewing distance of the camera is 0.5m to 4.5m, and the moving range of the picking robot end is within 0.5m~2m, considering the difficulty of picking fruit trees at different distances, the picking area of the picking robot is limited to an area about 1m~1.5m away from the fruit trees.
[0078] The end effector of the picking ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More