

Acrobot model-based diagonal support static balance control method for quadruped robot
A quadruped robot, diagonal support technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of inconsistent state of quadruped robot body, limit robot movement efficiency, complex environment adaptability, quadruped robot Problems such as aircraft heading deflection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
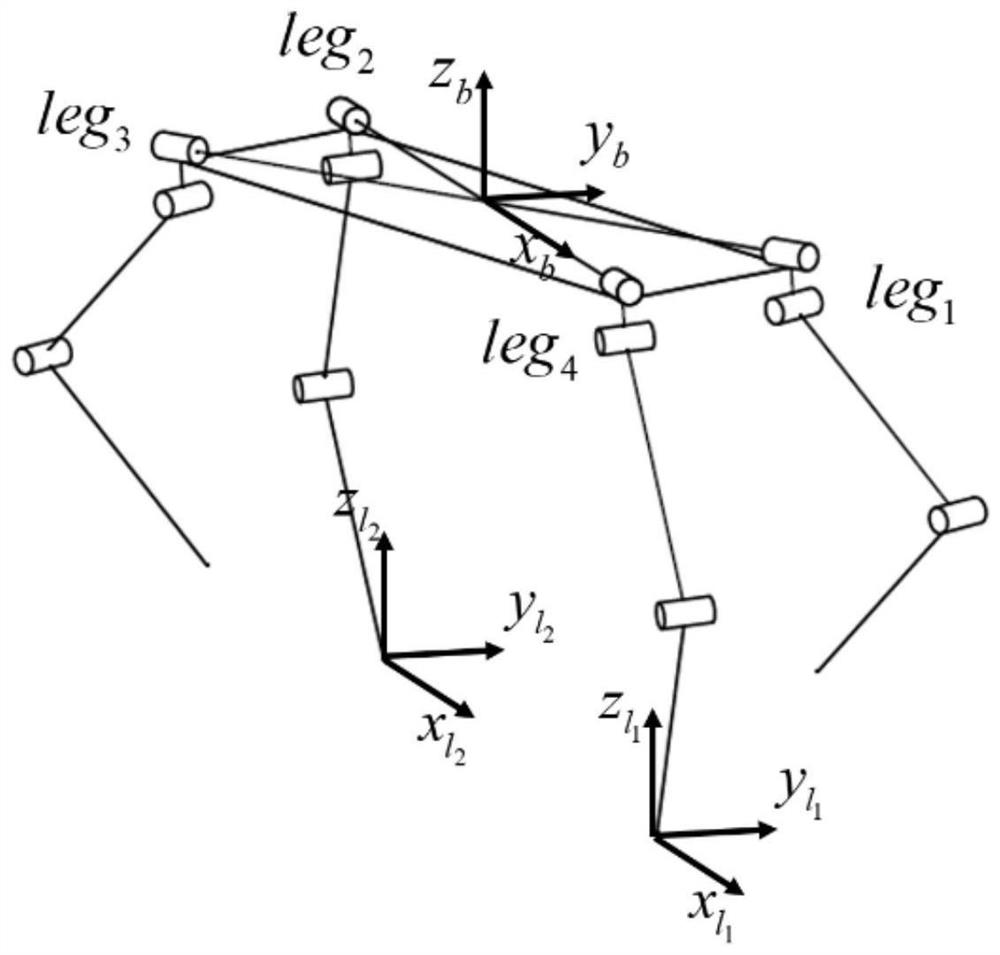
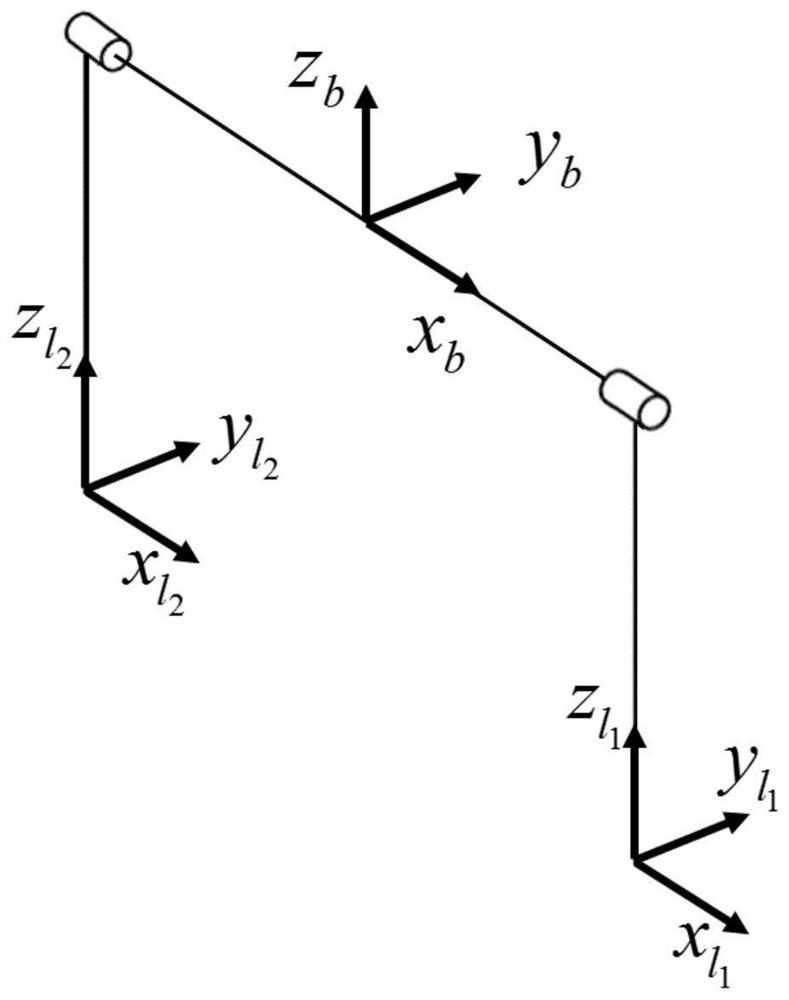
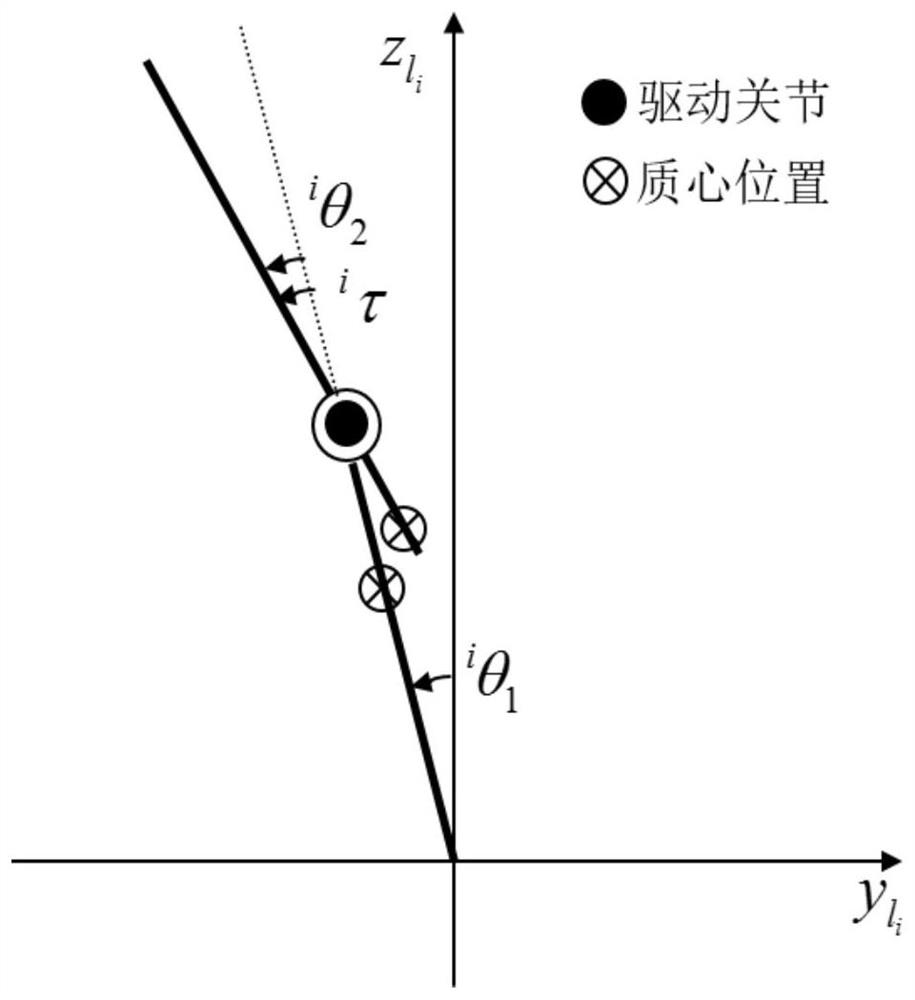
[0053] The invention provides a static balance control method for a quadruped robot's diagonal support based on the Acrobot model, which simplifies the diagonal support model of the quadruped robot, reduces the complexity of balance control, and introduces the Acrobot underactuated inverted pendulum model. It solves the problem that the center of mass of the body will deviate from the position of the rotation axis; finally, for the complex nonlinear system of Acrobot, the linear quadratic regulator (LQR) is used to stabilize the control at the balance point, and through simulation analysis and model establishment , the diagonal support model is simplified to a virtual underactuated second-order inverted pendulum Acrobot model, and the static balance control of the diagonal support is further carried out.
[0054] A kind of quadruped robot diagonal support static balance control method based on Acrobot model of the present invention comprises the following steps:
[0055] S1. E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More