

Multifunctional grasping forceps for minimally invasive surgery
A minimally invasive surgery, multi-functional technology, applied in the field of medical devices, can solve the problems of long time, mutual dislocation, unable to solve the clamping function, etc., to achieve the effect of convenient operation and flexible use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
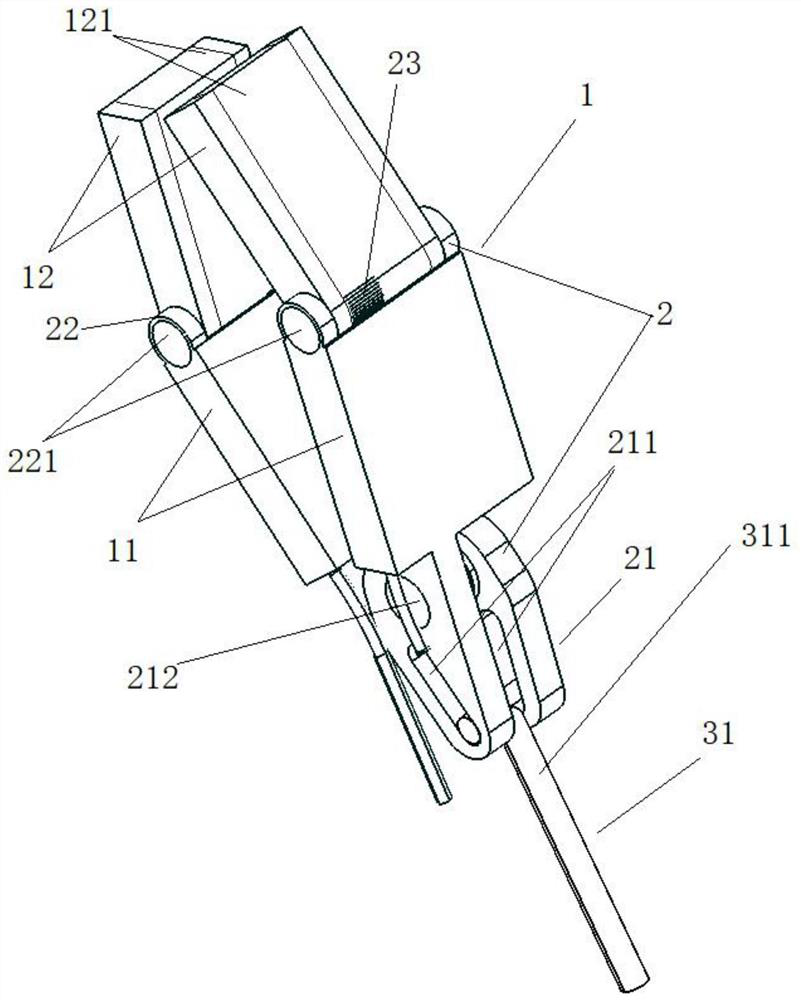
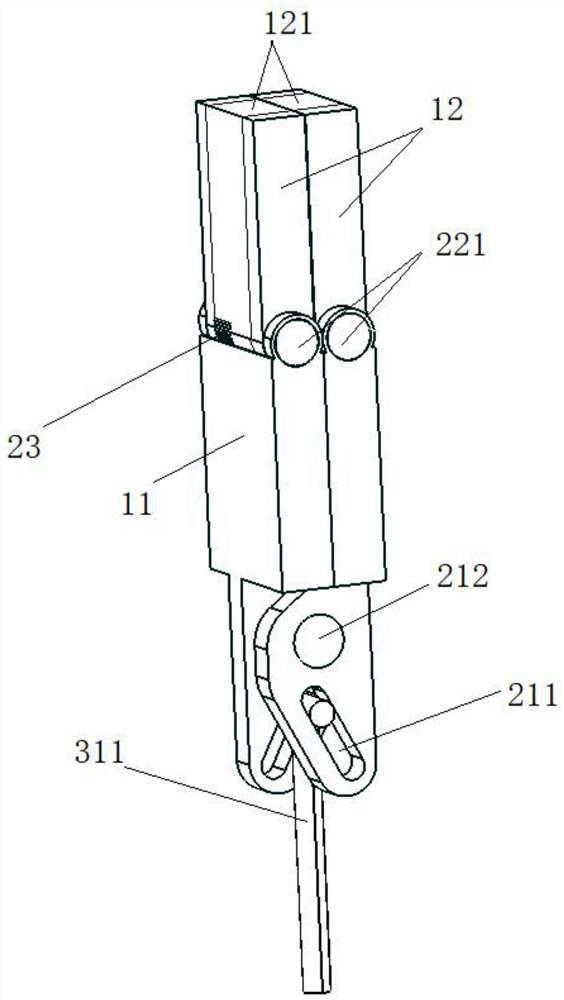
[0041] Please see attached figure 1 , attached figure 2 , with figure 1 It is a schematic diagram of a multifunctional grasping forceps for minimally invasive surgery of the present invention, with figure 2 It is a schematic diagram of another state of a minimally invasive surgery multifunctional grasper of the present invention; a minimally invasive surgery multifunctional grasper, including a clamping part 1, an installation part 2, and a motion control mechanism 3; the motion control mechanism 3 controls the installation part 2 The movement of the mounting part 2 drives the opening and closing movement of the clamping part 1; the clamping part 1 includes a first clamping part 11 and a second clamping part 12, and the mounting part 2 includes a first mounting part 21 and a second mounting part 22 , the motion control mechanism 3 includes a first motion control mechanism 31 and a second motion control mechanism 32 (not shown in the figure);
[0042] The first mounting pa...
Embodiment 2
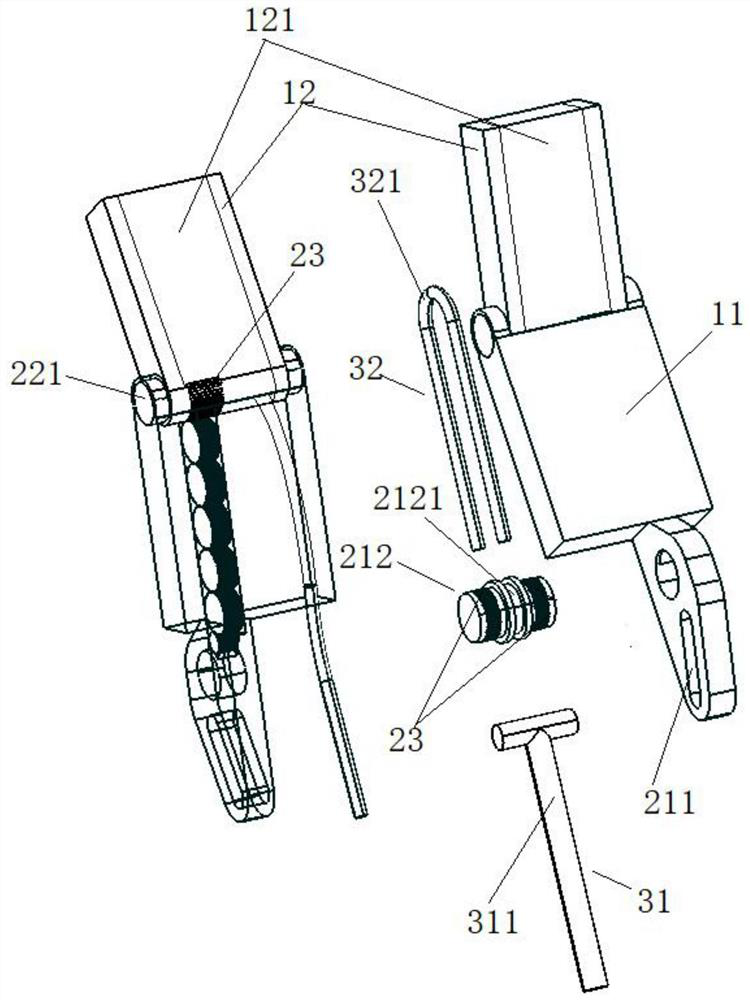
[0051] Please see attached Figure 5 , attached Figure 6 , with Figure 5 It is a schematic diagram of the first rotating hinge part of another minimally invasive surgery multifunctional grasper of the present invention, with Figure 6 It is a schematic diagram of the cooperation of the first rotation hinge of another minimally invasive surgery multifunctional grasper of the present invention. This embodiment is basically the same as Embodiment 1, the difference is that the two sets of gear tooth structures 23 on the first rotating hub 212 are independently sleeved on the outer wall of the first rotating hub 212, and can be carried out relative to the first rotating hub 212. Correspondingly, the two sets of gear tooth structures 23 have independent motion control mechanisms 3, that is, two sets of driving slots 2121 and corresponding driving wires 321. The relative rotation of the clamping part 12, therefore, the number of transmission gears in the left and right first cla...
Embodiment 3
[0053] Please see attached Figure 7 , with Figure 7 It is a schematic diagram of a surgical instrument of the present invention; a surgical instrument, including the minimally invasive surgery multifunctional grasper of the present invention, and also includes a terminal driving part 4, and a connecting pipe 41 connecting the terminal driving part 4, the first The motion control mechanism 31 and the second motion control mechanism 32 are connected to the terminal driving part 4, and the remote control of the driving wire 321 and the T-shaped tie rod 311 is realized through the terminal driving part 4, and then the corresponding movement of the clamping part 1 is realized. The control of the bipolar coagulation function is realized through wires. It should be noted that the terminal driving part 4 can be a manual driving part (such as a knob, a rocker, a lever handle) that mechanically drives the driving wire 321 and the T-shaped pull rod 311. handles, pull rods, etc.), or e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More