

An Optimization Method for Positioning Error of Robot Machining System
A technology of robot processing and optimization methods, which is applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve problems such as errors and achieve the effect of reducing positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0143] Apply the method of the present invention to carry out the simulation experiment, and the process is as follows:
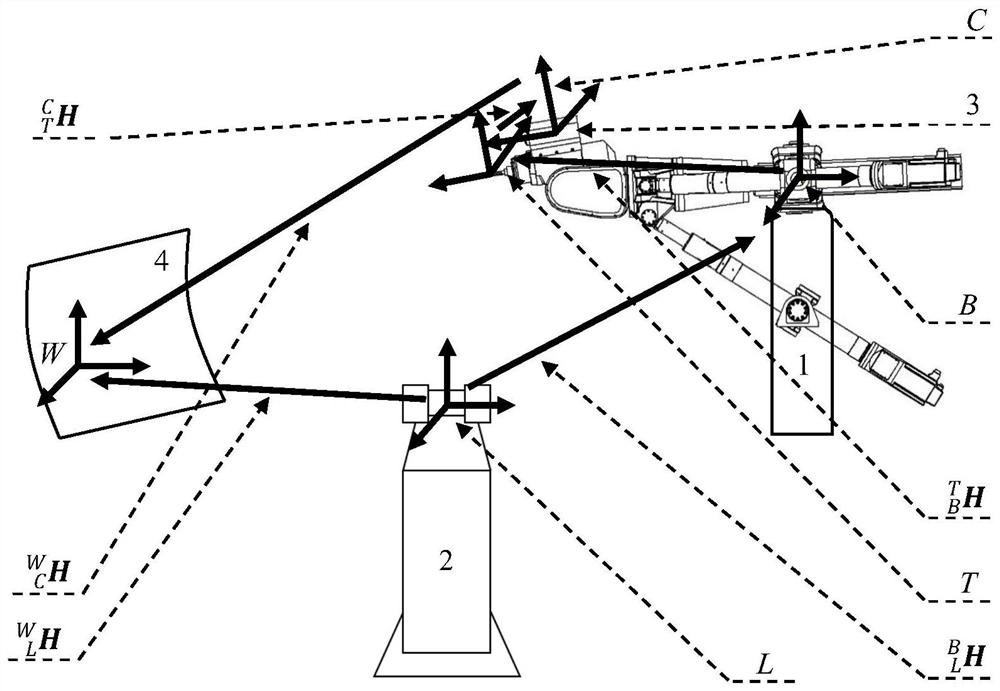
[0144] 1) Establish a storage matrix of points in the five coordinate systems of the laser tracker coordinate system, the robot base coordinate system, the robot end tool coordinate system, the fringe projection measurement system coordinate system, and the workpiece coordinate system.
[0145] 2) Randomly generate 110 points in the coordinate system of the laser tracker as ideal points. Randomly generate the rotation Euler angle and translation matrix in the transformation matrix between 4 sets of coordinate systems, as the transformation relationship between the ideal coordinate systems; pass 110 points in the laser tracker coordinate system through the transformation relationship between the ideal coordinate systems Convert to each coordinate system, and add the error, as the actual point. Among them, the error obeys a normal distribution, the standard ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More