

High-precision indoor positioning method based on joint vision and wireless signal features
A wireless signal, indoor positioning technology, applied in the direction of location information-based services, specific environment-based services, neural learning methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
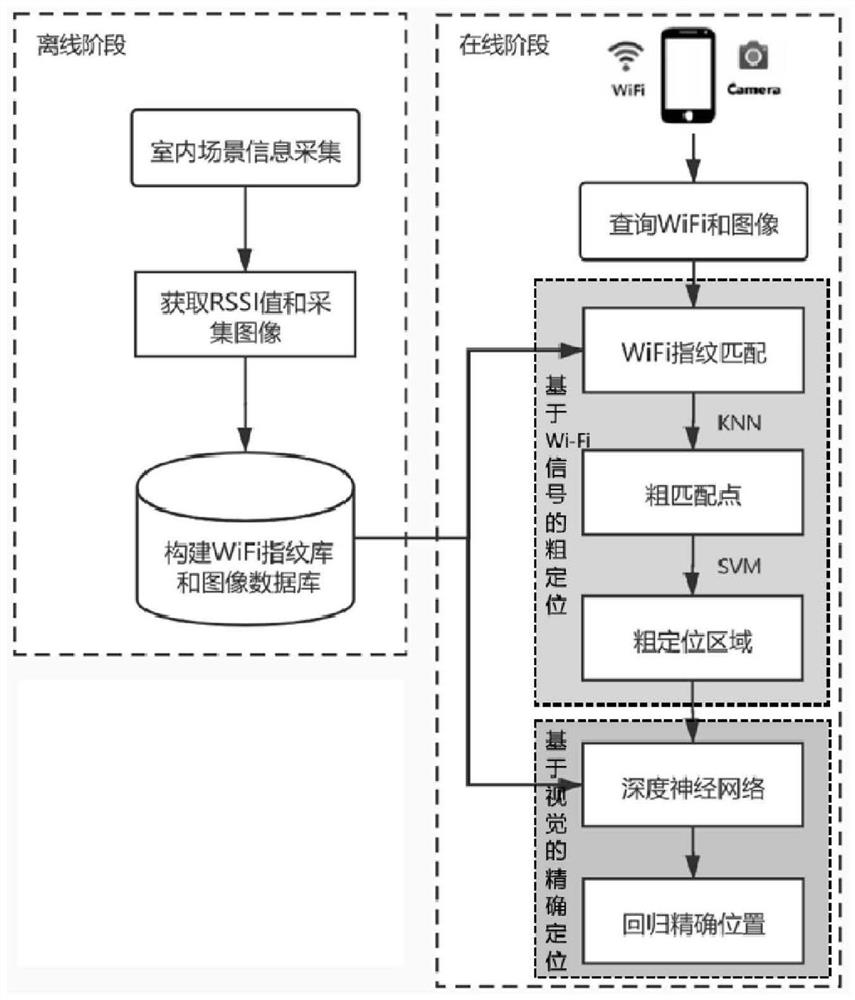
[0017] Such as Figure 4 As shown, this embodiment involves a high-precision positioning method that combines vision and wireless signal features. The test is carried out under the specific environment setting of a 4000-square-meter office building corridor. Because there are floating people in the corridor environment of the office building, the Wi- Such an environment poses a challenge to achieve good Wi-Fi signal-based positioning. Moreover, there are many windows on one side of the corridor, and the light conditions will change greatly during the day. This method can achieve a positioning accuracy of 0.62m at a grid size of 1.5m. The method specifically includes: figure 1 Steps shown:
[0018] Step 1: Collect indoor scene information, obtain RSSI value and image data, specifically: in the offline stage, in the predetermined range of indoor scenes, use such as Figure 5 The mobile robot shown with a Wi-Fi module and an image acquisition module establishes communication wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More