

A Parallel Mechanism with Motion Bifurcation Characteristics
A technology of motion bifurcation and characteristics, applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problem of fewer parallel mechanisms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
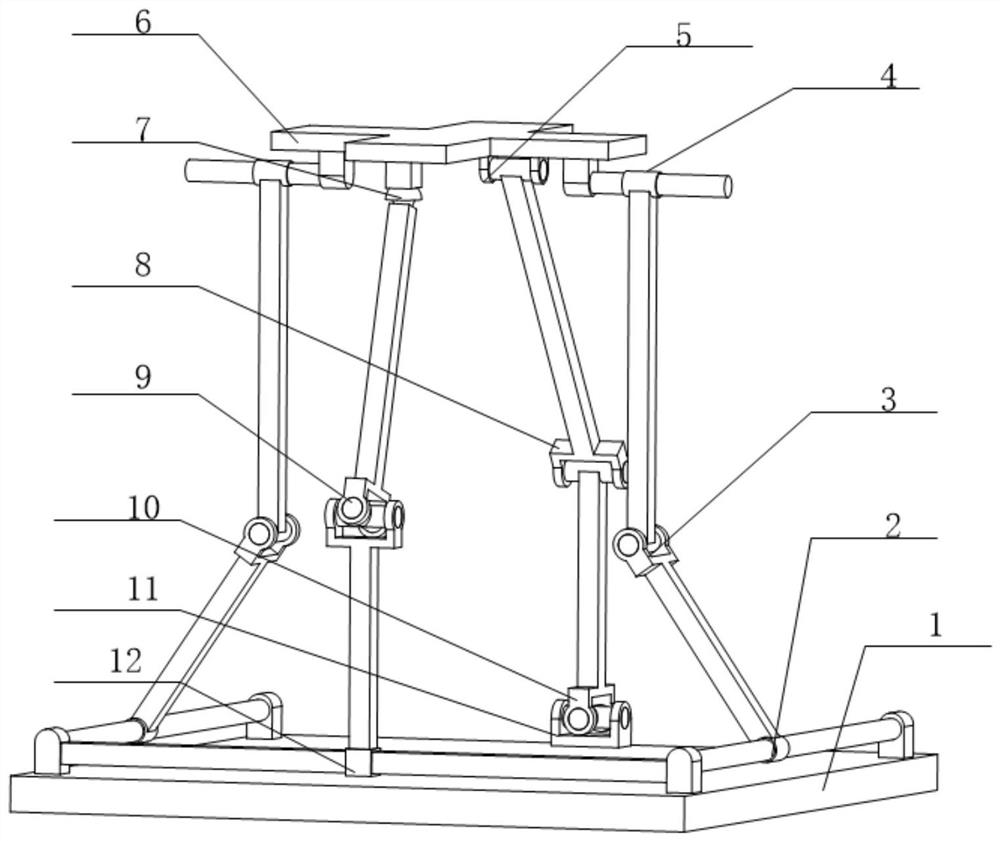
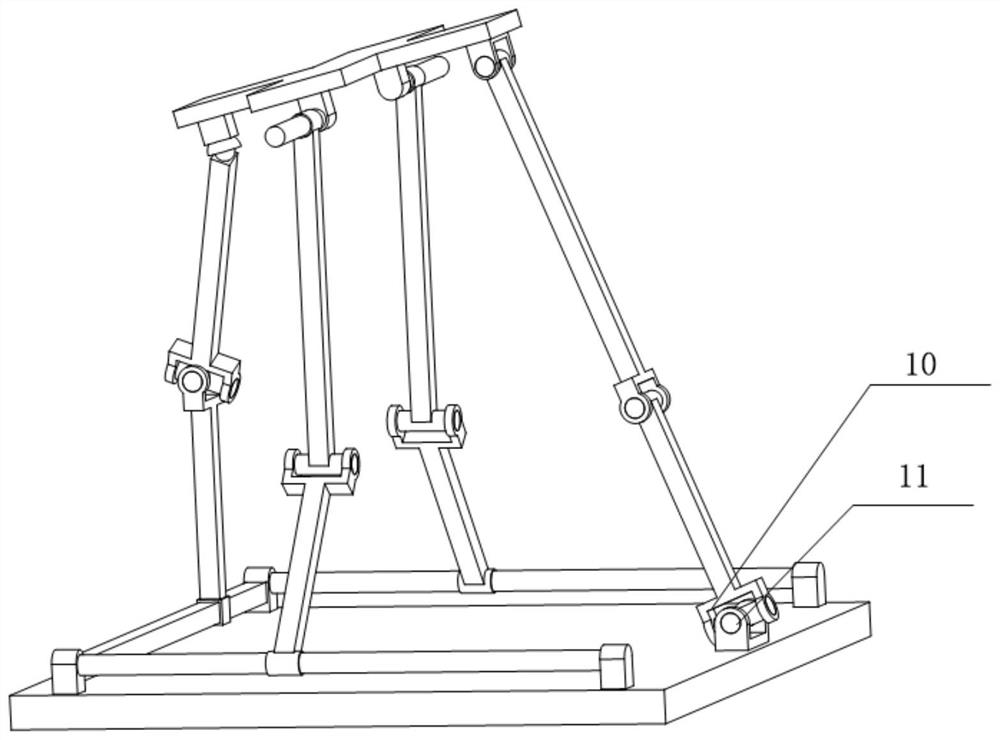
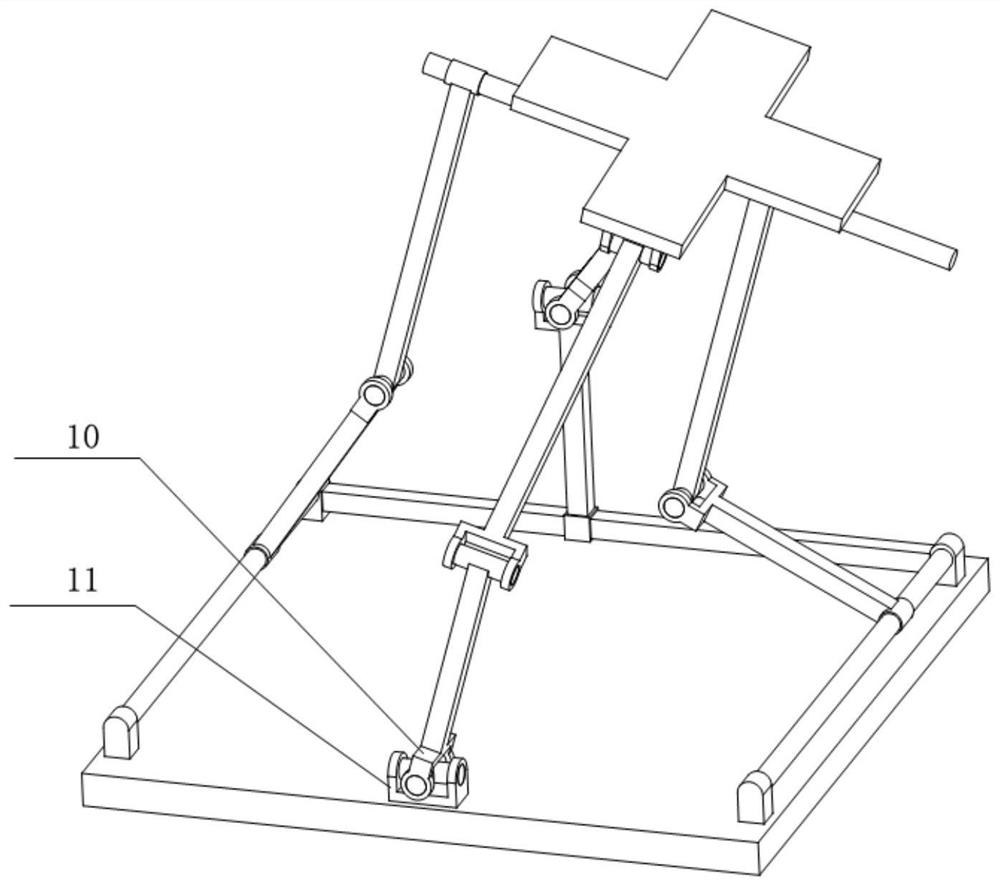
[0023] Such as Figures 1 to 3 As shown, this embodiment provides a parallel mechanism with motion bifurcation characteristics, including a fixed platform 1, a moving platform 6, two first branch chains and a The second branch chain and a third branch chain; the both sides of described fixed platform 1 are respectively connected with the bottom end of a described first branch chain, and the both sides of described moving platform 6 are connected with a describ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More