

Spatial double-arm system constraint motion planning method based on deep intensive learning
A technology that strengthens learning and constrains motion. It is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools. It can solve problems such as poor versatility and collision damage of manipulators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
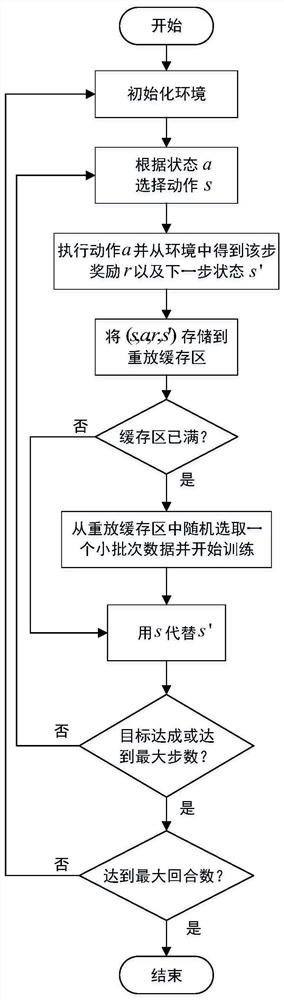
[0060] refer to figure 1 As shown, a method for constrained motion planning of a space dual-arm system based on deep reinforcement learning of the present invention, the steps are as follows:
[0061] 1) Using the generalized Jacobian matrix to establish the kinematics model of the dual-manipulator system in free-floating space;
[0062] The kinematics model of the space dual manipulator system is established according to the following formula (1):
[0063]
[0064] in, I v 0 and I ω 0 are the velocity vector and angular velocity vector of the space manipulator base in the inertial reference system, respectively; and are the velocity vector and angular velocity vector of the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More