

Robot moving platform for restaurant
A mobile platform and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that the staff can't keep up with the influx of people, can't finish Chinese dishes, and have objections from dining staff. Achieve the effect of fast movement, heavy load, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing, the present invention will be further explained;
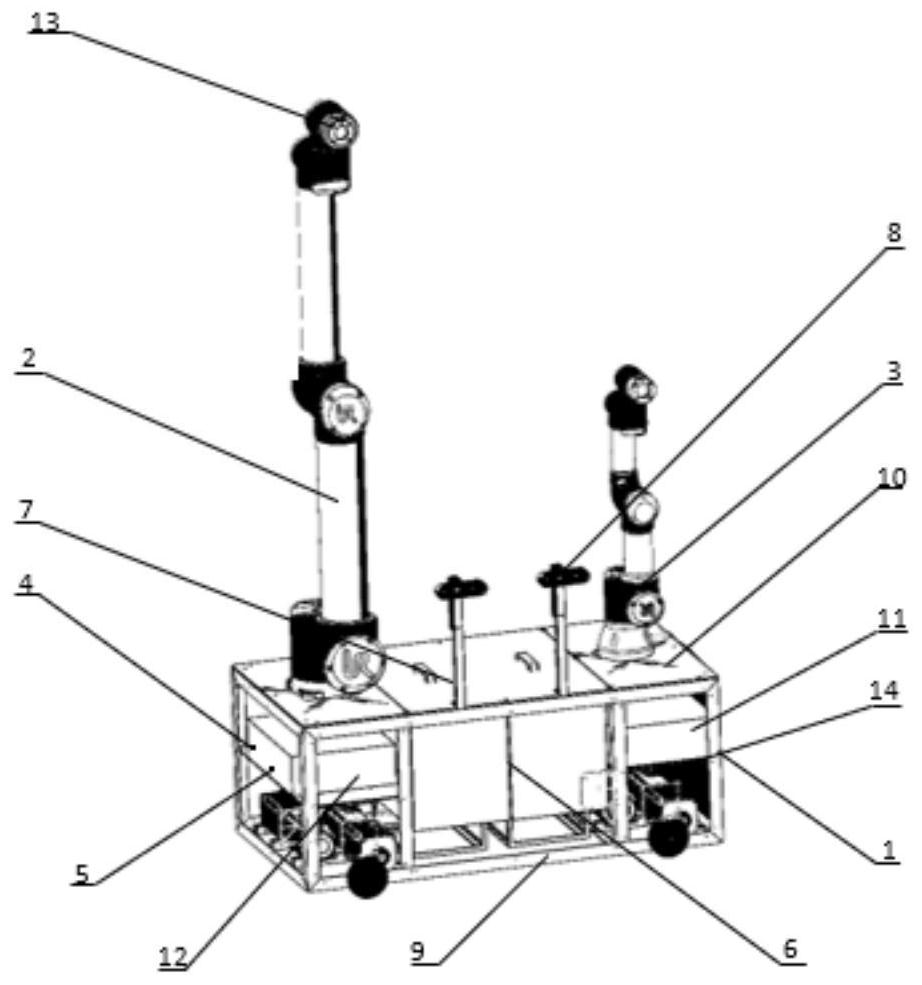
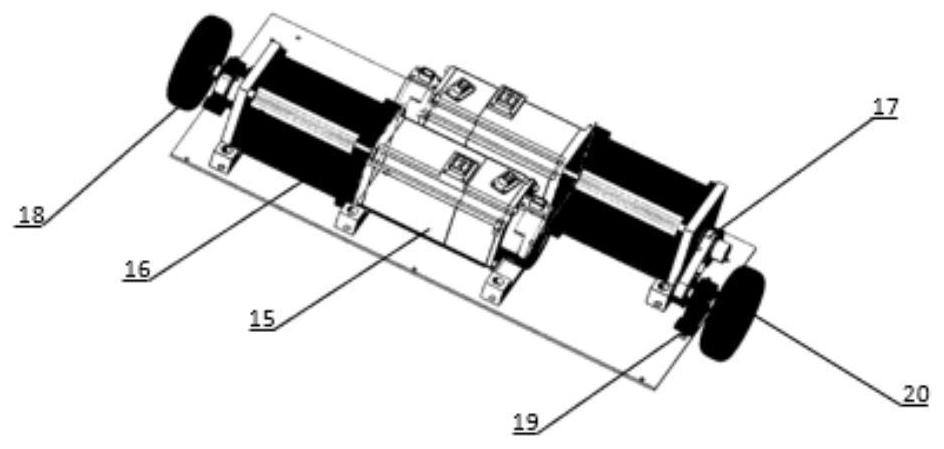
[0025] like figure 1 , figure 2 As shown, 1 is the outer frame, 2 is the long robot arm, 3 is the short robot arm, 4 is the ultrasonic sensor module, 5 is the infrared sensor module, 6 is the driver of the robot arm, 7 is the support frame, and 8 is the RGB-D depth Camera, 9 for chassis, 10 for car cover, 11 for industrial computer, 12 for permanent magnet servo motor driver, 13 for torque sensor, 14 for counterweight, 15 for permanent magnet servo motor, 16 for reducer, 17 for synchronization Pulley, 18 are shaft couplings, 19 are vertical bearings with seats, and 20 are solid load-bearing rubber wheels.
[0026] A restaurant-oriented robot mobile platform, including an outer frame, a chassis, a vehicle cover, first to fourth synchronous pulleys, first to fourth couplings, first to fourth solid load-bearing rubber wheels, first to fourth Four permanent magnet servo mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More