

Collaborative operation method, system and device, computer equipment and storage medium
A technology of operation and equipment, applied in the field of automatic operation, can solve the problems of uneven spraying, abnormal growth of fruit trees, low efficiency, etc., and achieve the effect of ensuring the effect of plant protection operations and improving the efficiency of plant protection operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
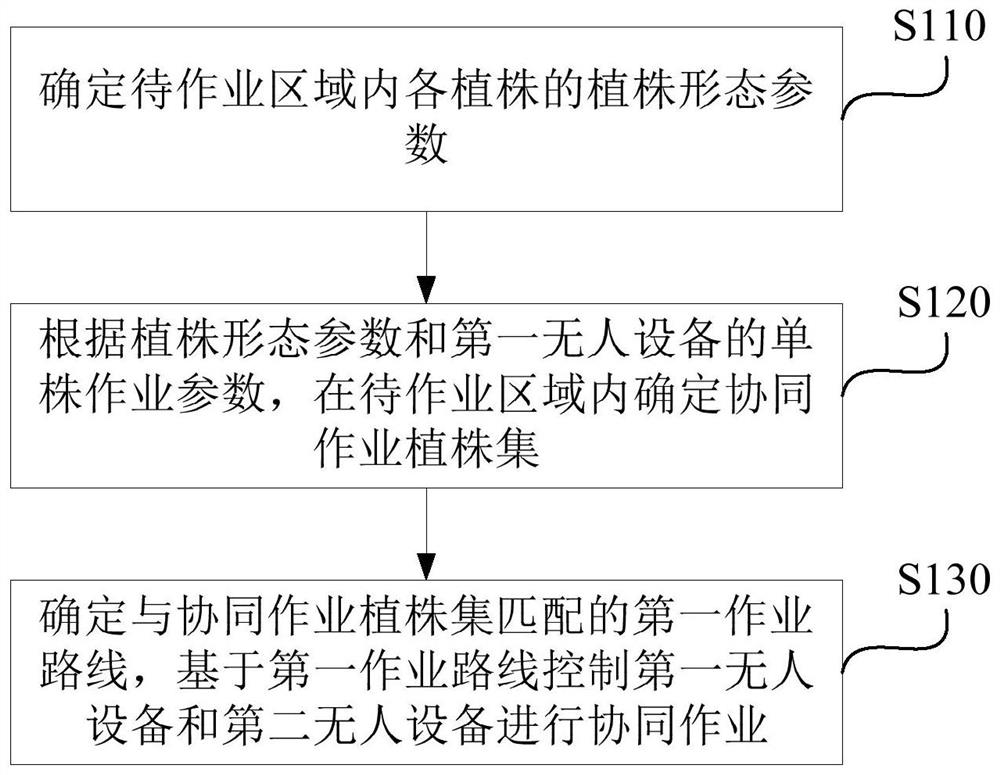
[0072] figure 1 It is a flow chart of a collaborative operation method provided by Embodiment 1 of the present invention. This embodiment is applicable to generating a working route based on a collaborative operation plant set (a set of plants requiring multiple unmanned devices to work together) in the area to be operated. And send it to each unmanned device for collaborative operation. The method can be executed by a collaborative operation device, which can be implemented by software and / or hardware, and can generally be integrated in a terminal (for example, an unmanned equipment control panel) or a server with data processing functions. Correspondingly, such as figure 1 As shown, the method includes the following operations:
[0073] S110. Determine the plant morphological parameters of each plant in the area to be operated.
[0074] Wherein, the area to be operated includes a plurality of plants requiring plant protection operations. Typically, the area to be operate...
Embodiment 2
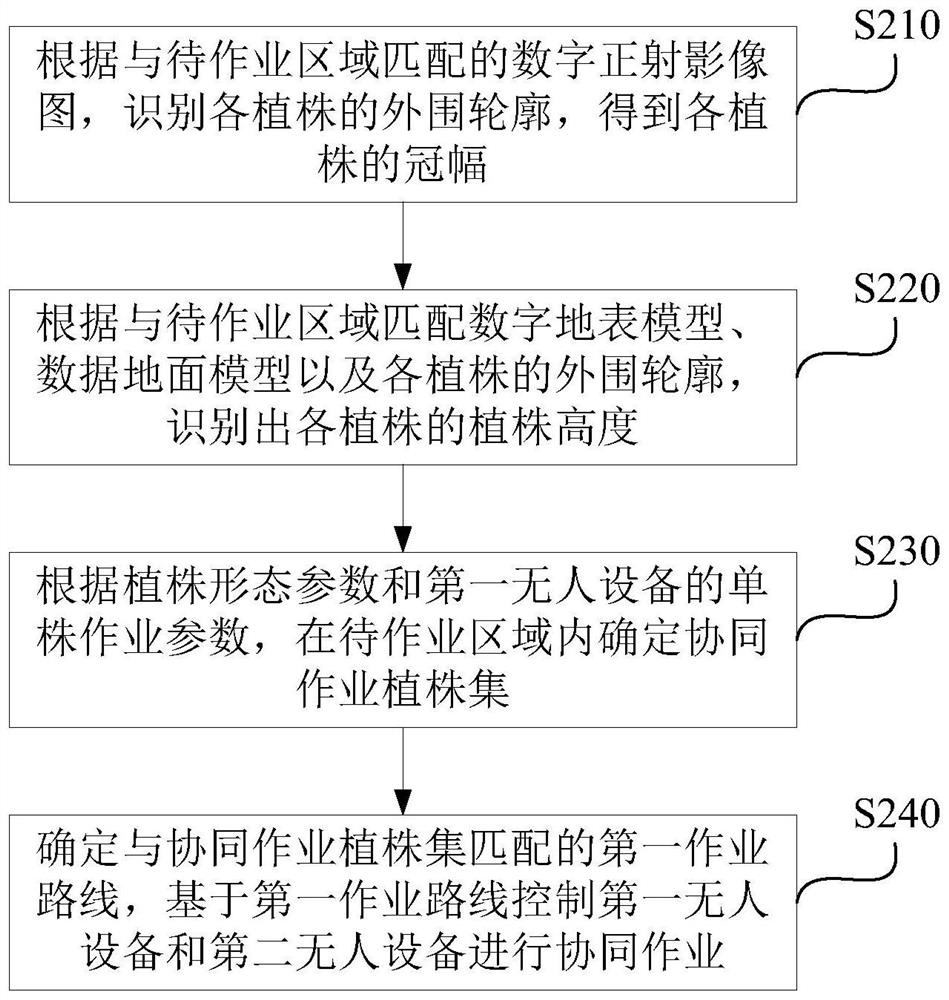
[0096] Figure 2a It is a flow chart of a collaborative operation method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, the plant height and / or The crown width, as the operation of the plant morphological parameters, is further refined. Correspondingly, such as Figure 2a As shown, the method of this embodiment may include:
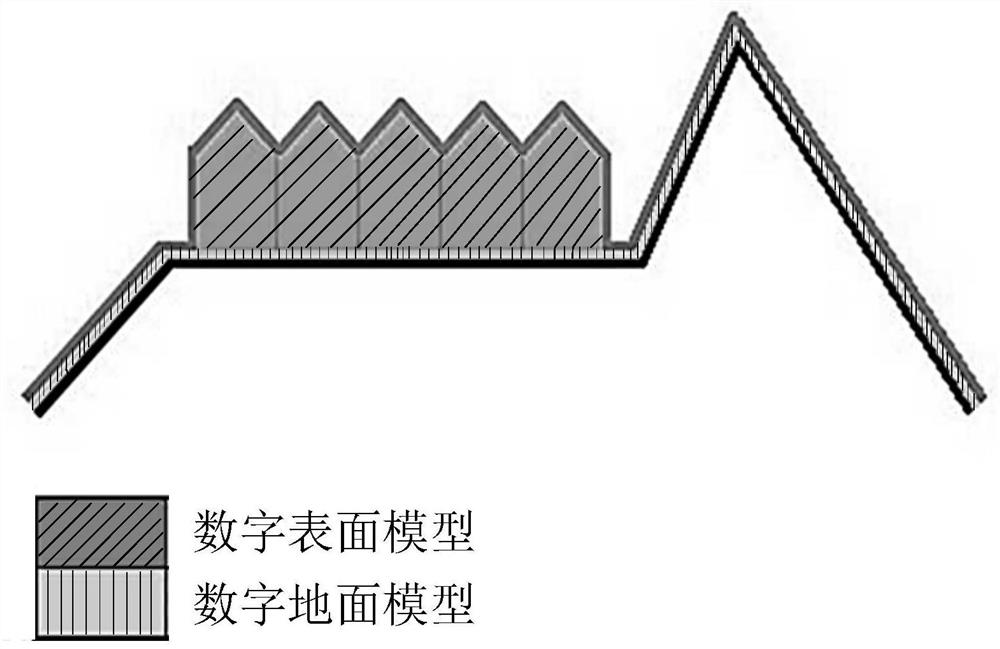
[0097] S210. According to the digital orthophoto map matched with the area to be operated, identify the peripheral outline of each plant, and obtain the crown width of each plant.
[0098] First, in this embodiment, the plant height and crown width of each plant in the area to be operated are used as plant morphological parameters.
[0099] DOM (Digital Orthophoto Map) is a set of digital orthophotos generated by digital differential correction and mosaicking of aerial (or aerospace) photos, and cropped according to a certain map range. It is an image wi...
Embodiment 3
[0118] image 3 It is a flowchart of a collaborative operation method provided by Embodiment 3 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, according to the plant morphological parameters and the single plant of the first unmanned device Operation parameters, the operation of determining the cooperative operation plant set in the area to be operated, is embodied as: according to the plant morphological parameters and the individual plant operation parameters of the first unmanned equipment, determine the cooperative operation plant set and the individual operation plant in the area to be operated set; at the same time,
[0119] After the operation of determining the collaborative operation plant set and the individual operation plant set in the area to be operated according to the plant morphological parameters and the individual plant operation parameters of the first unmanned equipment, it also spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More