Robot distribution task scheduling method and system
A task scheduling and robotics technology, applied in the field of robotics, can solve problems such as inability to achieve delivery benefits, waste of time, and affect timely delivery of items
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
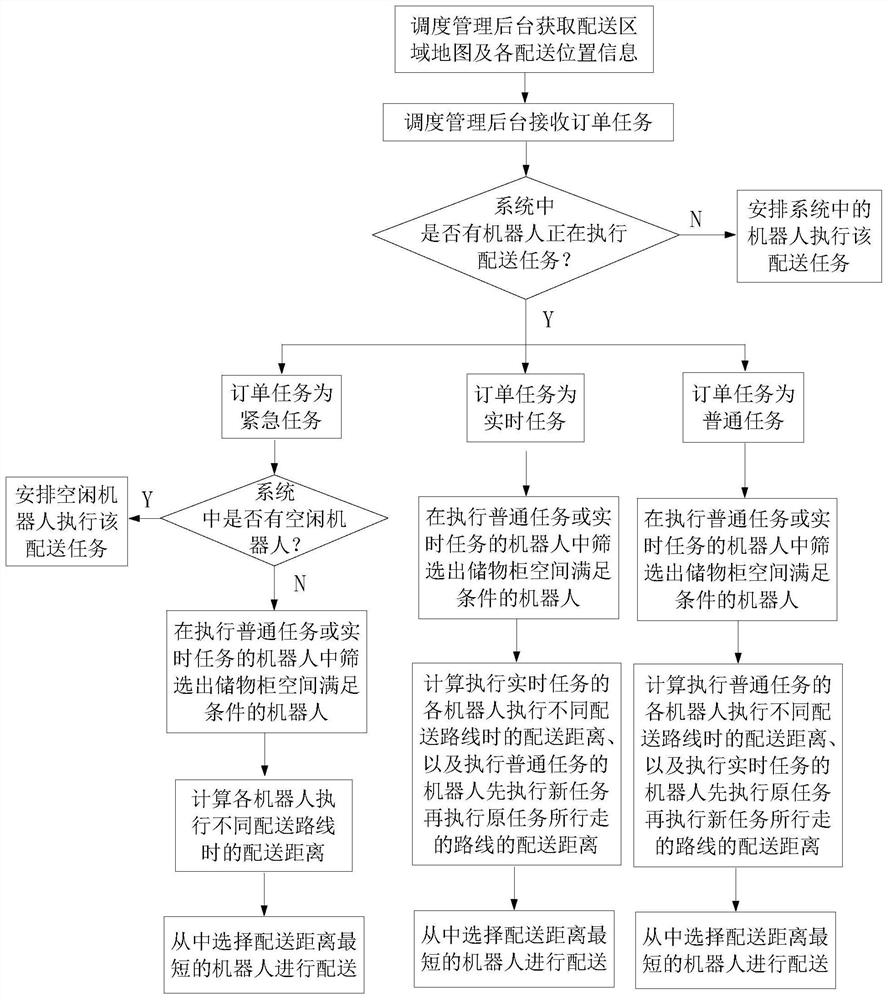
[0039] A robot distribution task scheduling method, such as figure 1 shown, including the following steps:
[0040] S1. The dispatching management background obtains the delivery area map and the delivery location information.
[0041] S2. The scheduling management background receives order tasks; among them, the levels of order tasks are divided into ordinary tasks, real-time tasks, and urgent tasks; ordinary tasks can be delivered within a fixed time after the order is placed; real-time tasks need to arrange delivery immediately after the order is placed , but accepting new tasks is supported during the delivery process; urgent tasks need to be dispatched immediately after the order is placed, and receiving new tasks is not supported during the delivery process.
[0042] The delivery order is placed by the user through the client operation, and the order task information generally includes the delivery destination, task level, storage space required for the delivery item, e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com