Vehicle-in-loop automatic driving vehicle testing method, system and device in mixed scene
A technology of automatic driving and testing methods, applied in testing/monitoring control systems, general control systems, electrical testing/monitoring, etc., can solve problems such as high risk factor of simulation testing, high testing costs, and dependence on testing sites, etc., to achieve effective autonomy Driving test, the effect of less resource usage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] In order to more clearly introduce the specific content and advantages of the present invention, a further description will be given below in conjunction with the drawings and embodiments. The examples involved in the implementation modes are used to introduce the overall process of the present invention, but not to limit the scope of application of the present invention.
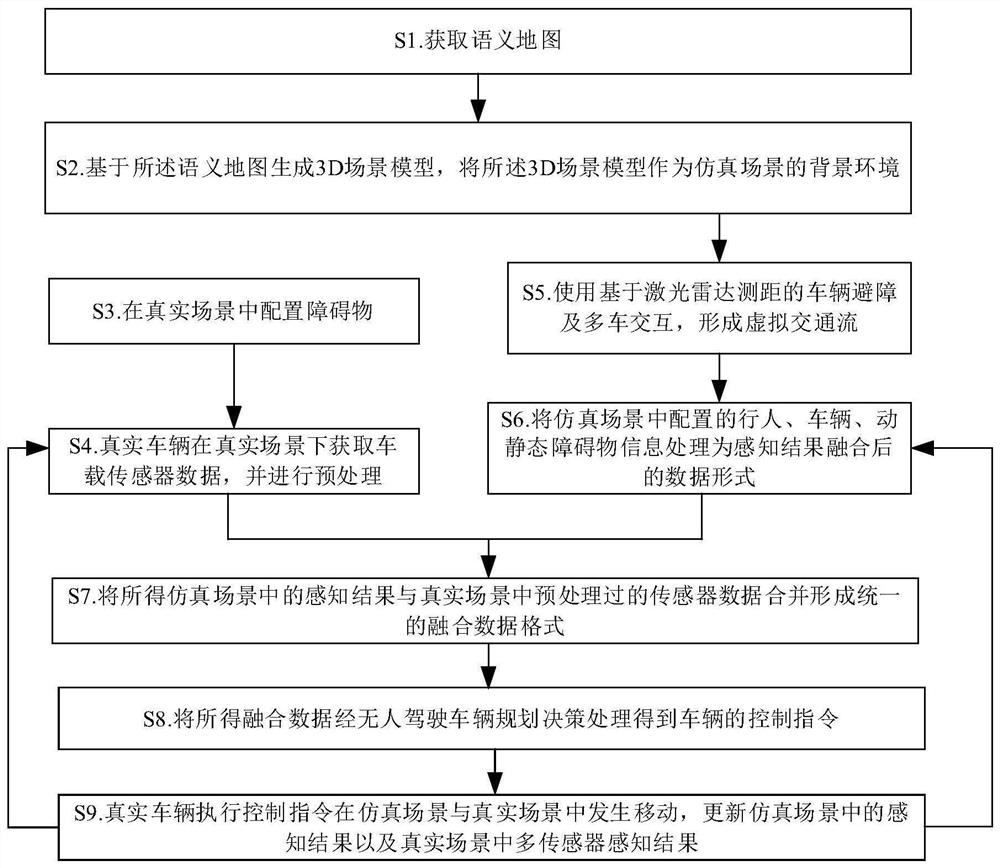
[0042] refer to figure 1 , figure 2 and image 3 , a flexible self-driving vehicle testing method that supports a vehicle in a loop under a mixed scene that combines virtual reality and reality provided by the present invention includes:
[0043] S1. Build a semantic map by yourself or build a semantic map based on the high-precision point cloud map of the real scene;
[0044] S2. Generate a 3D scene model by semantic map modeling as the background environment of the simulation scene;
[0045] S3. Configure simple obstacles in the real scene, including but not limited to water horses, cones, etc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



