

Image acquisition method and device for simulating crowded scene and visual processing method
A technology for crowding scenes and simulating images, applied in the field of image processing, it can solve the problems of insufficient data, missed or false detection of robots, and highly similar data distribution, and achieves the effect of ensuring quality, good generalization performance and robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
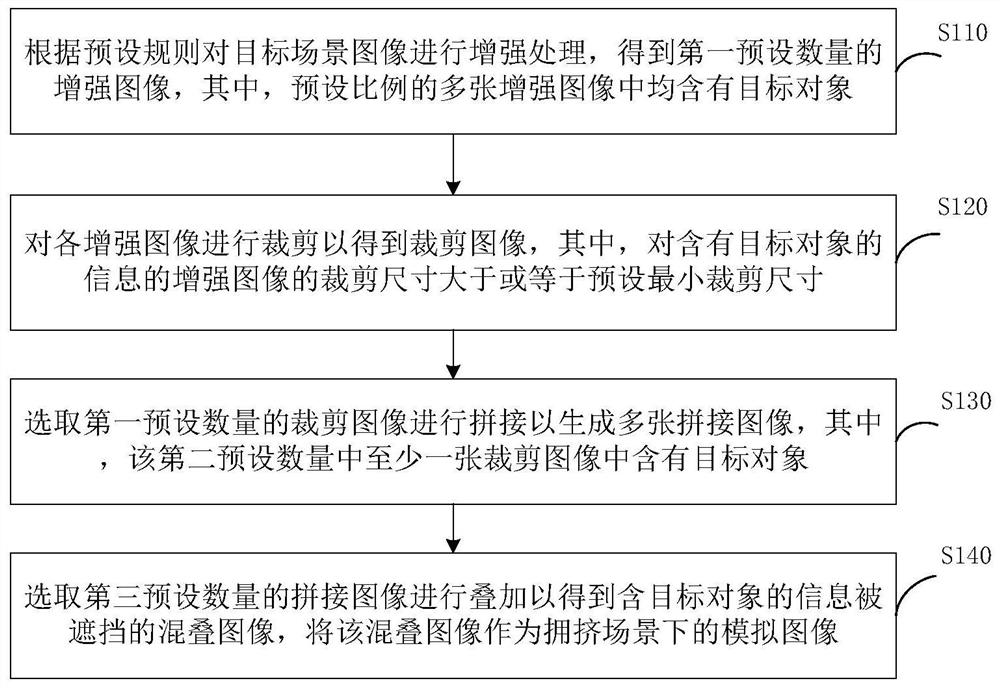
[0068] Please refer to figure 1 , this embodiment proposes an image acquisition method for simulating a crowded scene, which can be applied to a scene where partial information of a simulated target object is blocked or overlapped. Considering the limited number of target scene images, this embodiment uses a series of image processing operations to process the limited target scene images to obtain more simulated images in crowded scenes. This method will be described below.
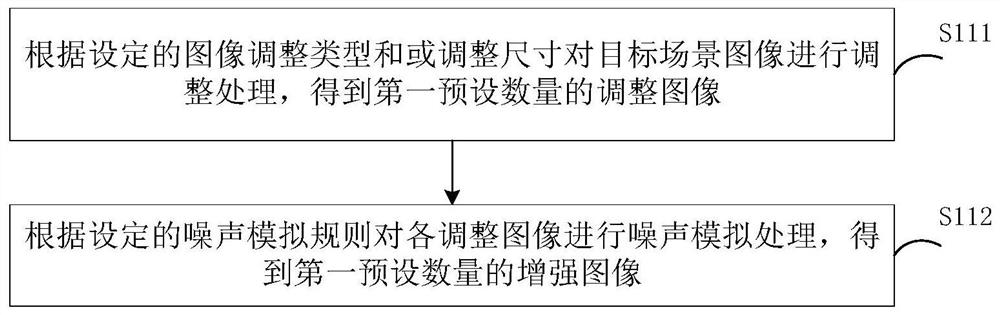
[0069] Step S110, performing enhancement processing on the target scene image according to a preset rule to obtain a first preset number of enhanced images, wherein a preset ratio of multiple enhanced images all contain the target object.
[0070] Usually, the number of target scene images includes multiple pieces, and a larger number of enhanced images can be obtained by using these target scene images for data enhancement processing. The first preset quantity can be set according to actual training ne...
Embodiment 2
[0106] Please refer to Figure 5 , similar to the image acquisition method in the above-mentioned embodiment 1, this embodiment proposes an image acquisition method, which is not limited to simulate images in crowded scenes where object information is blocked, but can also be used in other occasions, such as Training image augmentation when migrating from a simulation scene to a real scene, etc. Due to the roughness of the simulation data, it is impossible to accurately simulate the texture and other information of the real target target. If the image acquisition method is used for data expansion based on part of the real scene data, it can make up for the defects in the simulation data, thereby reducing the number of algorithm problems. The time consumption when the simulation scene is migrated to the real scene, etc.
[0107] Step S210, performing an enhancement on the target scene image to obtain multiple first images. Wherein, the primary enhancement includes performing ...
Embodiment 3
[0118] Please refer to Image 6 , this embodiment proposes a visual processing method, which mainly applies the above-mentioned image acquisition method to a terminal device including a camera, such as a robot. The visual processing method will be described below.
[0119] In step S310, the target scene image is captured by the photographing device, and a simulated image is generated based on the target scene image using the above-mentioned image acquisition method.
[0120] Generally, when the uses of the terminal devices are different, the neural network models adopted by the terminal devices are also different. Considering that the number of target scene images in the actual scene collected by the terminal device may be limited, when training the model, the training data may be insufficient or the distribution is highly similar, which will affect the training effect of the model. Therefore, this implementation The example proposes to enrich the diversity of training data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More