

Robot state processing method and device, computing equipment and storage medium
A technology of computing equipment and processing methods, applied in the computer field, can solve problems such as high labor cost and poor robot design effect, and achieve the effects of reducing redundant workload, improving performance design effect, and reducing labor cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
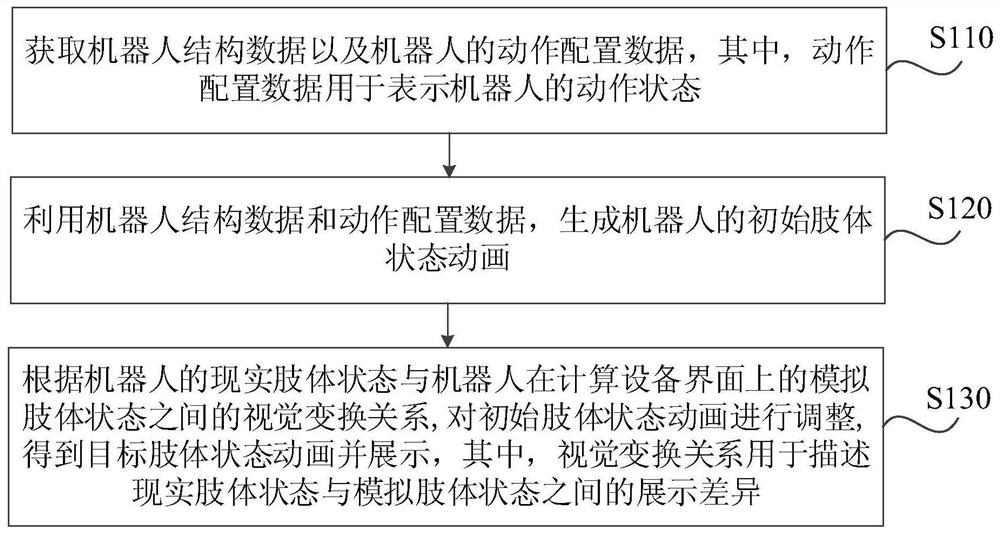
[0029] figure 1 It is a flowchart of the robot state processing method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of simulating and designing the robot state during the robot development process, such as designing or debugging robot actions, etc. The robot can be any Types of robots, such as intelligent interactive robots or toy robots. The method in this embodiment can be executed by a robot state processing device, which can be implemented in software and / or hardware. The device can be implemented in the form of an independent computing device, such as a robot design control panel, which has an operation interface; the device can also be integrated on any computing device with computing capabilities, such as installed in the form of a plug-in or client Notebook, computer, ipad. The device can be used as a visualization tool for robot design. For the convenience of expression, the technical solution of the embodiment o...
Embodiment 2
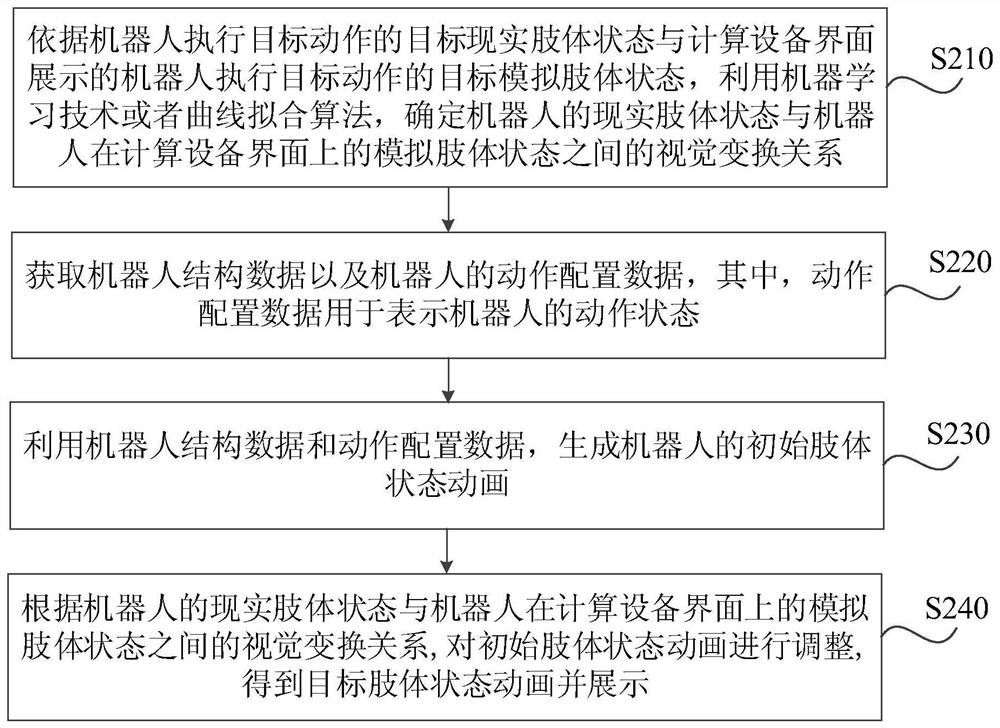
[0047] figure 2 It is a flow chart of the method for processing the state of a computing device robot provided by Embodiment 2 of the present invention. This embodiment is further optimized on the basis of the foregoing embodiments. Such as figure 2 As shown, the method may include:
[0048] S210. According to the target real limb state of the robot performing the target action and the target simulated limb state of the robot performing the target action displayed on the computing device interface, use machine learning technology or curve fitting algorithm to determine the actual limb state of the robot and the robot's real limb state on the computing device interface. Visual transformation relationships between simulated limb states on .
[0049] The visual transformation relationship is used to describe the displayed difference between the real limb state and the simulated limb state. In the process of determining the visual transformation relationship, for the same rob...
Embodiment 3
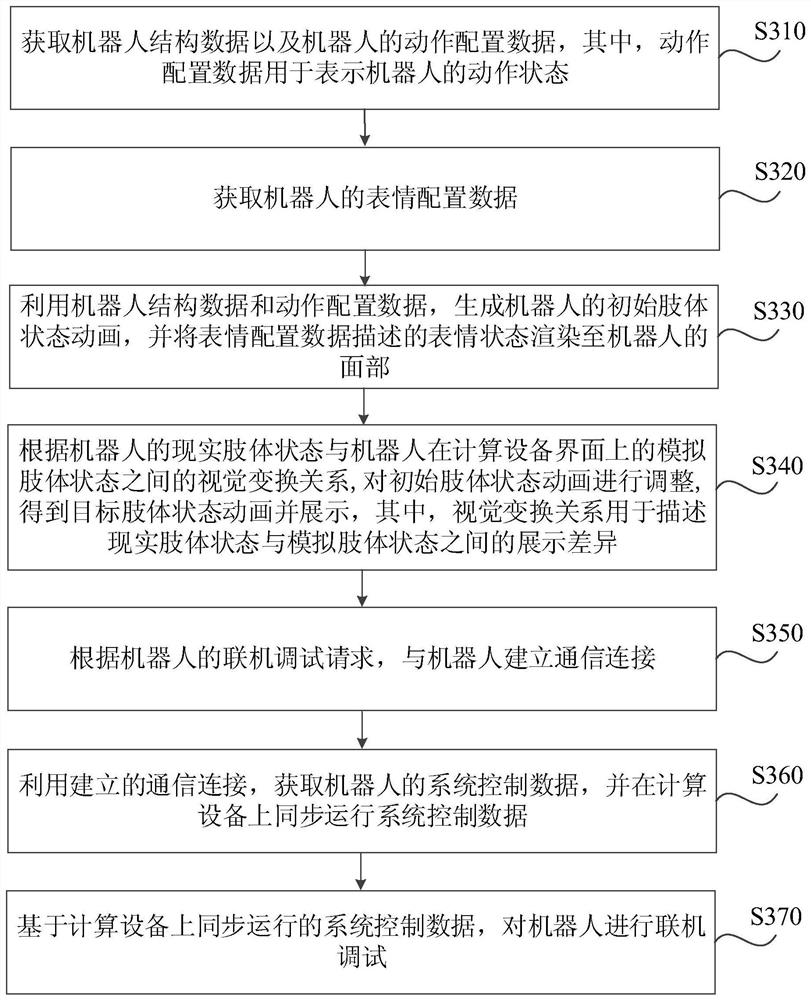
[0065] image 3 It is a flow chart of the method for processing the state of a computing device robot provided by Embodiment 3 of the present invention, and this embodiment is further optimized on the basis of the foregoing embodiments. Such as image 3 As shown, the method may include:
[0066] S310. Acquire robot structure data and robot action configuration data, wherein the action configuration data is used to represent the action state of the robot.
[0067] S320. Obtain expression configuration data of the robot.
[0068]In this embodiment, the client with the robot state processing function installed on the computing device also supports the editing function of the robot expression. Exemplarily, the user can input set expressions, such as happy, sad, etc., through the expression configuration data input box on the client interface; the user can also use the expression data import control on the client interface to import pre-written expression configuration data , t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More