

Unmanned aerial vehicle attitude calculation method and system based on least square method and EKF
A technique of least squares and aircraft attitude, applied in navigation calculation tools, navigation through speed/acceleration measurement, etc., can solve problems such as data noise and unevenness, improve accuracy and stability, improve stability, and improve stability and the effect of stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0058]In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments.
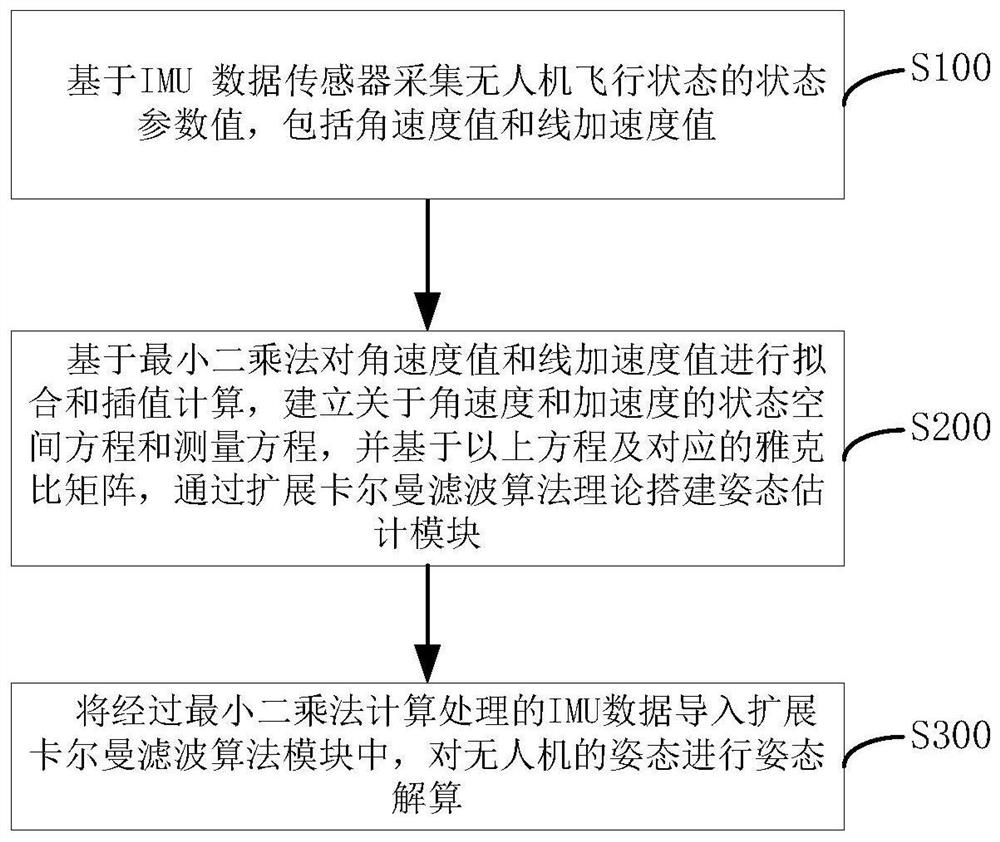
[0059] Such as figure 1 As shown, the method of UAV attitude calculation based on the least squares method and EKF described in this embodiment is mainly applicable to the field of multi-rotor UAVs, and UAVs are required to have at least three groups of 6-axis IMU data acquisition capabilities, including the following steps:
[0060] S100, based on the IMU data sensor, collect the state parameter values of the flight state of the drone, including angular velocity values and linear acceleration values;
[0061] S200. Fitting and interpolating th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More