

Static fusion method based on Gaussian mixture probability hypothesis density filter
A Gaussian mixture probability and hypothesis density technology, applied in the field of information processing, can solve the problems of low computational efficiency, poor fusion performance, and insufficient use of measured covariance, and achieve the effect of improving fusion performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
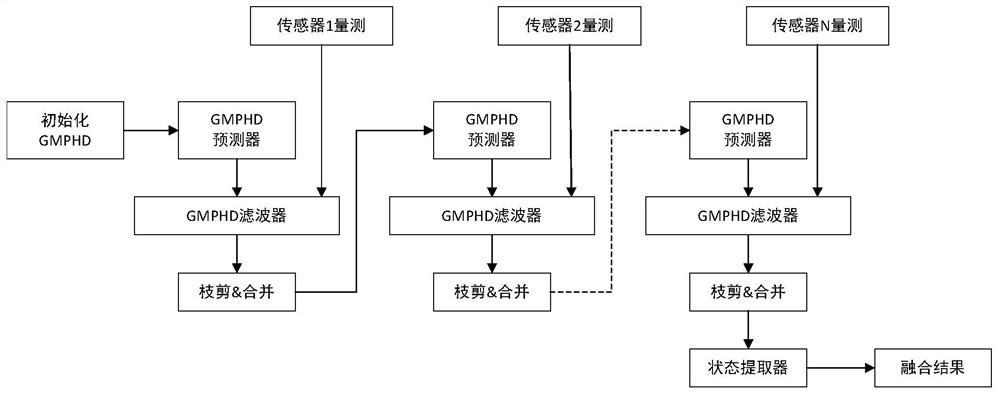
[0096] 1. Specify a fixed reference coordinate for sensor nodes and target positions in space, and specify a unified reference direction for orientation measurement. Each sensor returns a bearing measurement and a delay measurement of the target, subject to measurement errors related to the performance of the sensor node. The geometric relationship between the source-target-receiver is used for measurement conversion, and the azimuth and delay measurements are converted into corresponding two-dimensional Cartesian coordinates.
[0097] 2. The present invention regards the multi-sensor static fusion problem as a target tracking problem in the sensor dimension, so in this scene, the time interval of each scan is 0, and the motion state of the target within the sensor observation range is static, and there is no target However, there may be new targets within the observation range of the sensor, so mathematical modeling can be carried out to create corresponding target state mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More