Unmanned aerial vehicle cluster cooperative coverage method based on swarm intelligence
A technology of swarm intelligence and drones, applied in the field of drones, can solve the problems of communication bandwidth and software complexity growth, poor scalability, etc., and achieve high effectiveness, high coverage efficiency, and high scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to further describe the technical solution of the present invention in detail, this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific steps.
[0024] The embodiment of the present invention provides a swarm intelligence-based UAV cluster cooperative coverage method, and its specific implementation method is as follows:
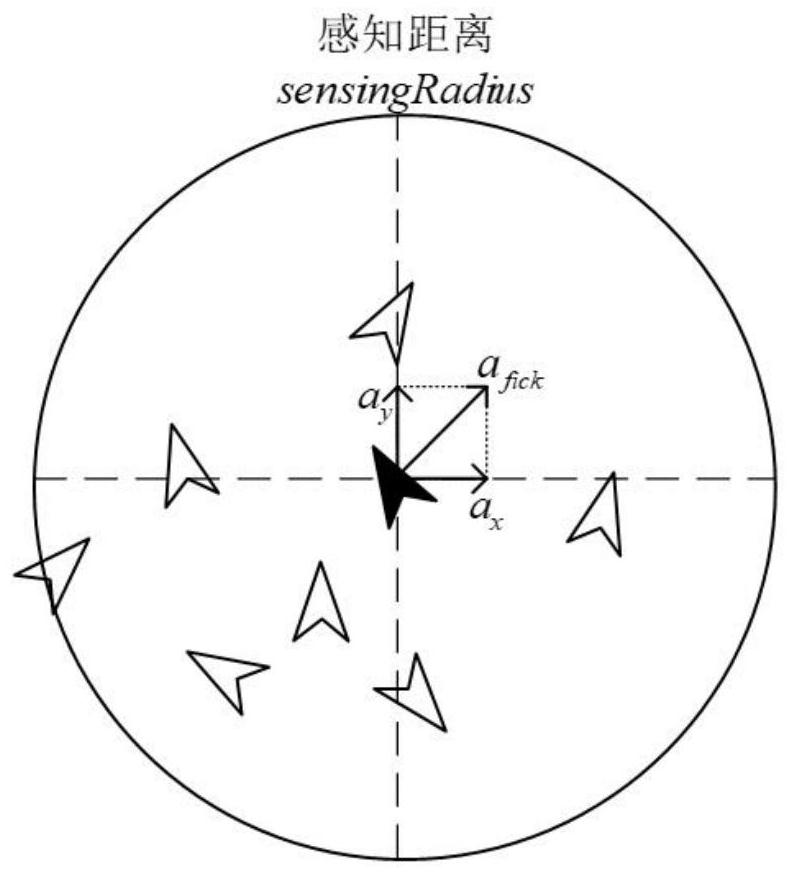
[0025] (1) The UAV cluster is modeled as a particle group in Fick's law, and the acceleration of each UAV in the UAV cluster is modeled as a Fick's model through Fick's law.
[0026] The specific implementation process is as follows: Fick's first law is described by formula (1), where D is the diffusion coefficient (m 2 / s), C is the volume concentration of the diffused species (number of atoms / m 3 or kg / m 3 ):
[0027]
[0028] In the present invention, the UAV cluster is modeled as a particle group in the diffusion model. The essence of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com