

Small component gripping and mounting manipulator
A technology of manipulators and small parts, applied in the field of manipulators, can solve the problems of high cost, weak gripping, and insufficient functions of grippers, etc., and achieve the effect of low production cost, wide application range, and reliable grasping of parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
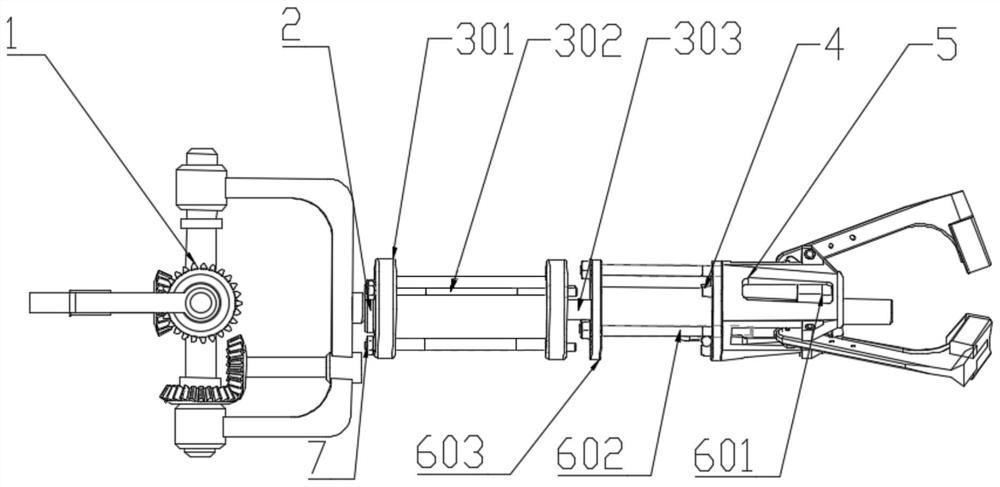
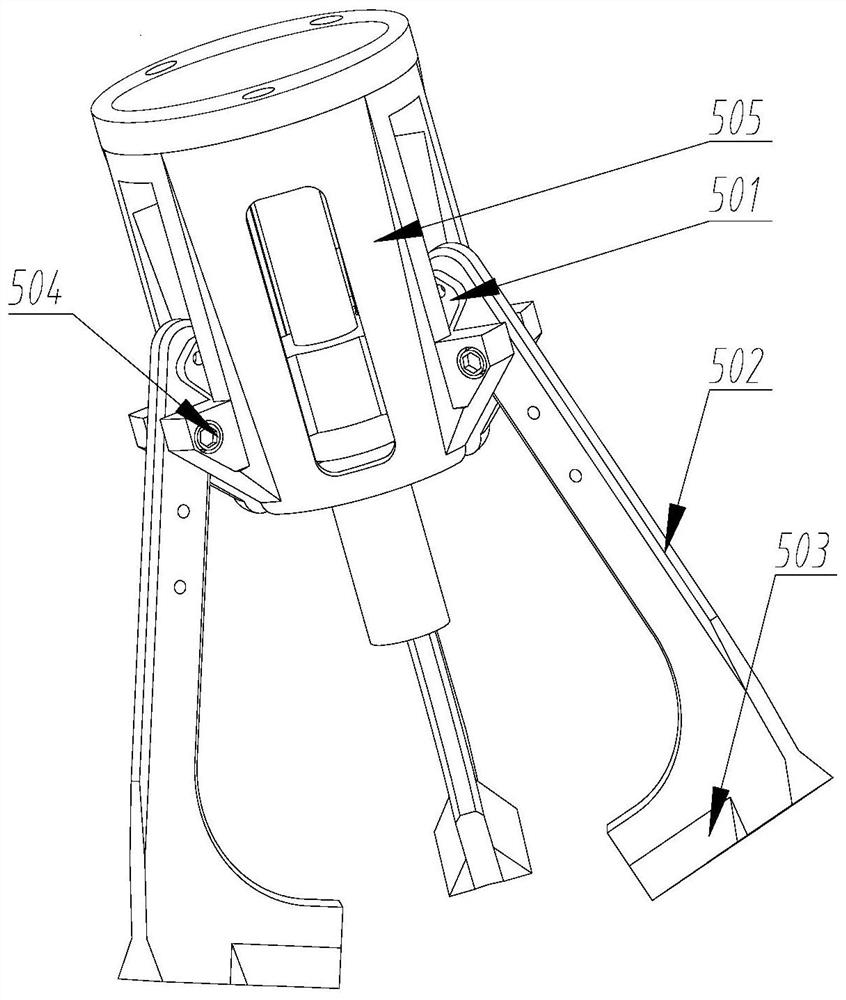
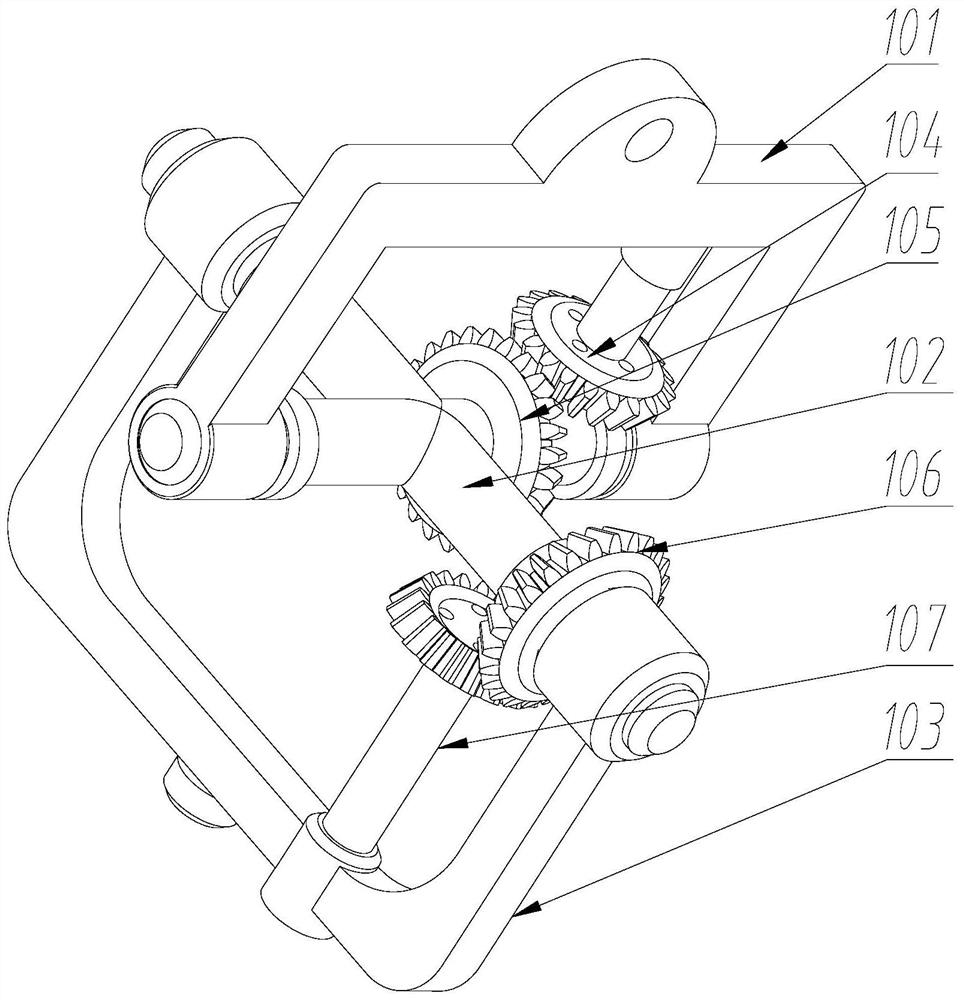
[0023] Embodiment 1, see Figure 1-Figure 3 , a small parts grasping and installing manipulator, comprising: a wrist mechanism 1, a first cylinder 3, a second cylinder 6 and a hand grip 5, wherein: the wrist mechanism 1 includes a first curved connecting rod 101, a cross connecting rod 102, The second curved connecting rod 103, the first bevel gear 104, the second bevel gear 105, the third bevel gear 106 and the fourth bevel gear 107 are convenient for adjusting the clamping angle and clamping parts in various positions. A curved connecting rod 101 is rotatably connected to the end of the cross-shaped connecting rod 102, the second curved connecting rod 103 is rotatably connected to the end of the cross-shaped connecting rod 102, and the first curved connecting rod 101 is provided with a The cylindrical groove installed by the first bevel gear 104 is used for fixedly connecting the first bevel gear 104, and the second curved connecting rod 103 is provided with a cylindrical gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More