

Device and method for dismounting and recovering steel coil binding belt by robot
A recycling device and robot technology, applied in transportation and packaging, packaging, binding material removal, etc., can solve the problems of irregular shape, robot damage, high labor intensity, etc., achieve the same curling shape of the straps, and reduce strict requirements , the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
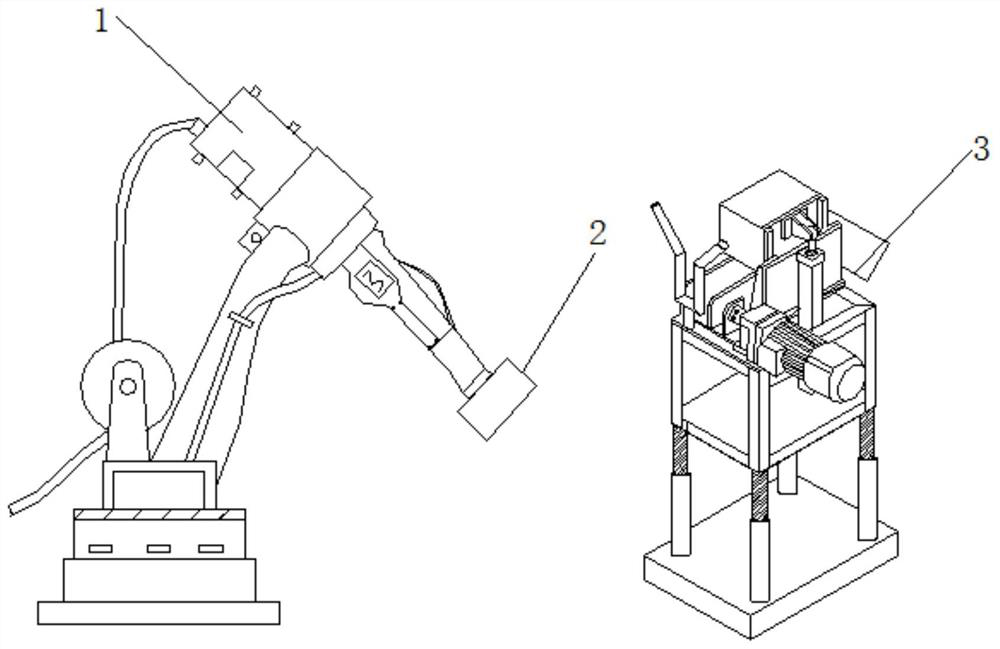
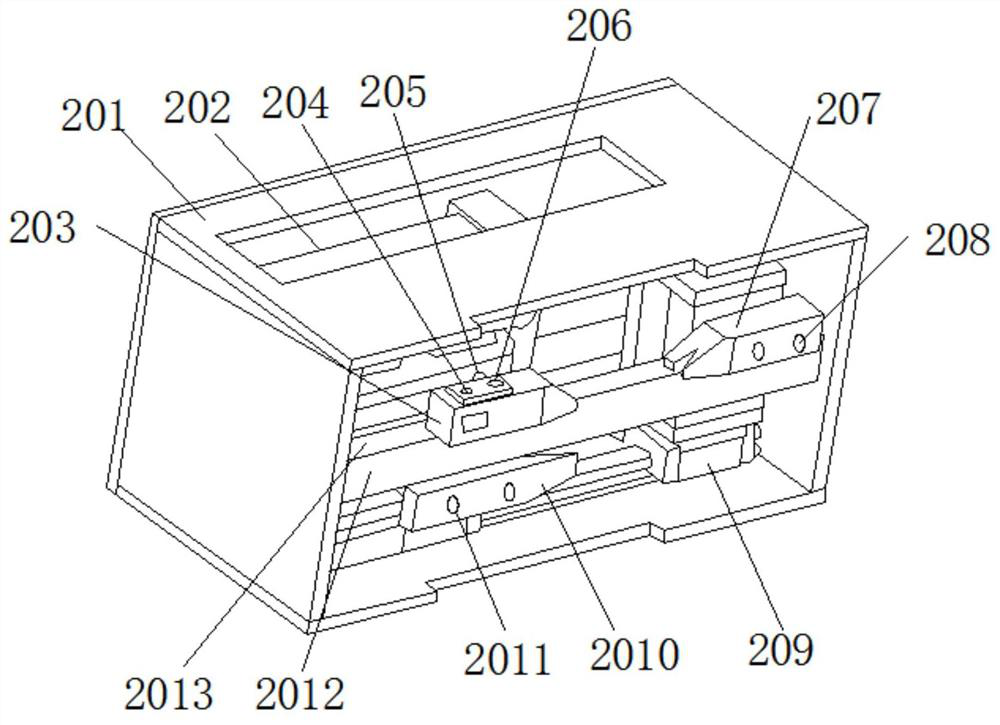
[0039] Such as Figure 1-Figure 5As shown, a robot steel coil strap removal and recovery device includes a robot body 1, and an end actuator 2 is installed on one side of the robot body 1, and there is no It includes a housing 201 fixedly connected to one end of the robot body 1, and a linear guide rail 1 209 is fixedly connected to one side of the inner wall of the housing 201, the linear guide rail 1 209 slider 1 is fixedly connected to the cylinder 202, and one end of the cylinder 202 is fixed The guide rod two 2011 is connected, and the other end of the guide rod two 2011 is fixedly connected with scissors 2010, the guide rod 2012 is fixed to the housing, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More