Multi-parameter model of articulated arm coordinate measuring machine and calibration method
A technology of a coordinate measuring machine and a calibration method, which is applied in the field of precision measurement, and can solve problems such as rotation accuracy errors and instrument measurement errors that cannot be corrected
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
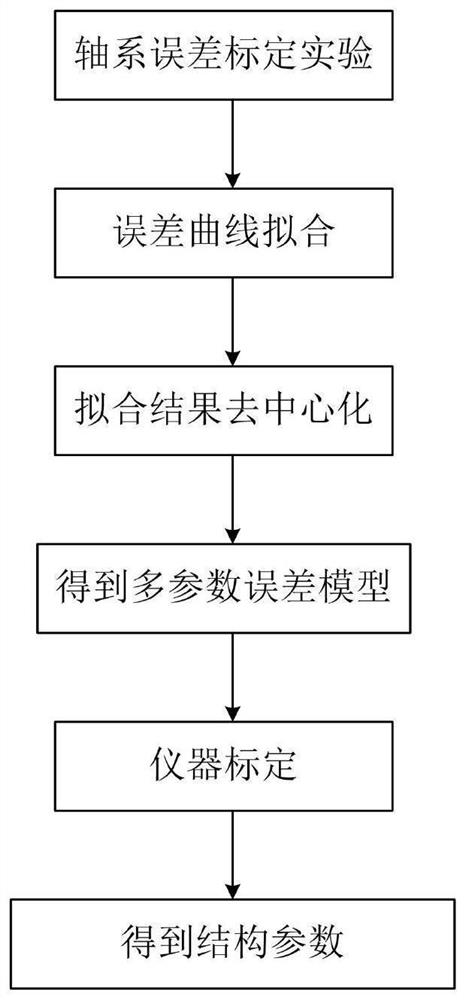
[0121] refer to figure 2 , the specific steps of determining the error value of the shafting rotation accuracy in the step S1 are as follows:
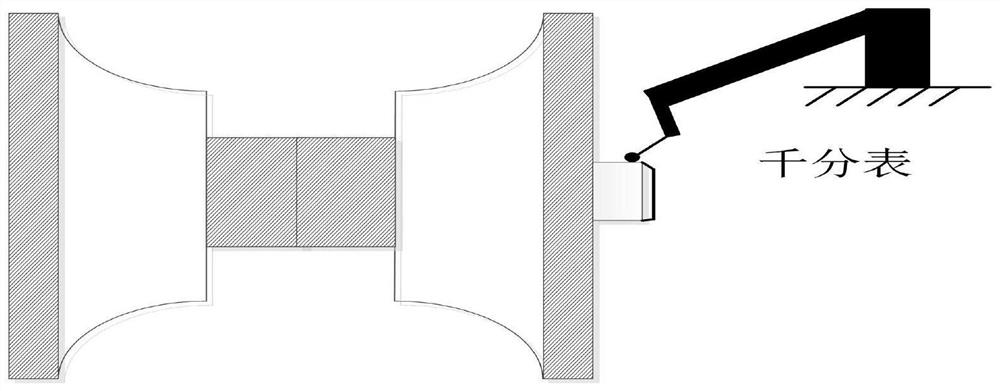
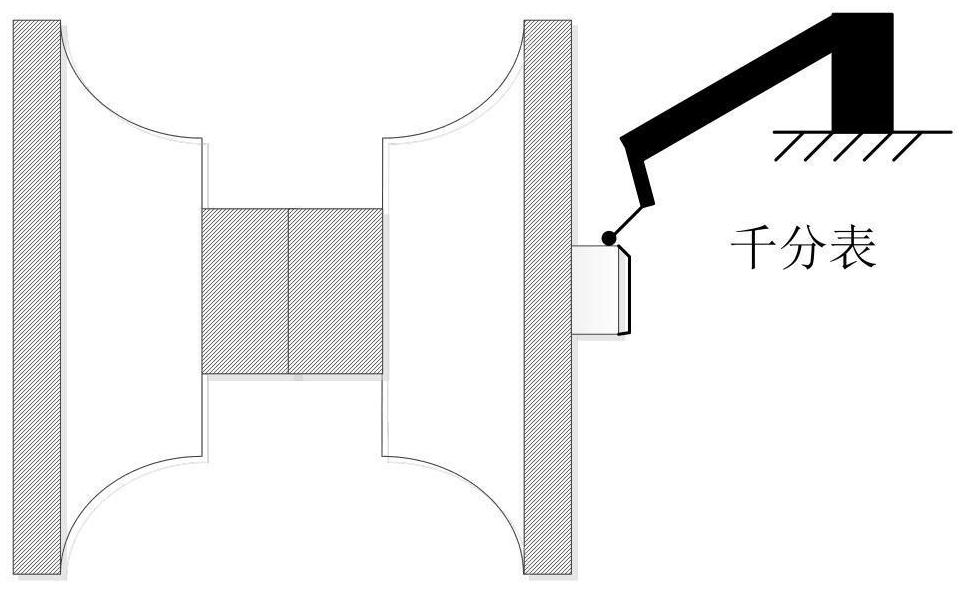
[0122] S101: Fix the plane mirror at the end of the rotating shaft, and lock the shaft system with a locking device;
[0123] S102: placing a dial indicator head on the surface of the plane mirror, rotating the rotating shaft, and leveling the plane mirror so that the change of the dial indicator is within 0.01 mm;
[0124] S103: placing the self-collimating light pipe horizontally above the tripod to ensure that the self-collimating light pipe is opposite to the plane mirror;
[0125] S104: The self-collimating light pipe is electrically connected to a computer, and the host computer program software is opened on the computer;
[0126] S105: Adjust the position of the self-collimating light pipe to ensure that the image of the cursor is displayed on the program software interface, and adjust the jump value of the image of the curso...
Embodiment 2
[0141] The step S2 performs error analysis to obtain the compensated shafting error curve function, and expands the shafting error curve function f(x) into a Fourier series as follows:
[0142]
[0143] Where k is the joint number, a 0 , a, b, and w are constants, which are calculated from the curve data. After the curve function is obtained, it is substituted into the shafting error mathematical model to calculate the probe coordinates of the instrument after compensation and evaluate whether the measurement accuracy of the instrument is improved.
[0144] Substitute the rotation accuracy signal obtained from the measurement into Equation (1) to obtain the rotation accuracy of the spindle, and obtain the rotation accuracy F i (θ i ) formula is as follows:
[0145] f i (θ i )=A i2 ×cos(θ i )+B i2 ×sin(θ i ) (2)
[0146] Among them, A i2 is the first parameter of the rotation accuracy of the i-th joint, B i2 is the second parameter of the rotation accuracy of the i-...
Embodiment 3
[0166] refer to Figure 5 , in the shaft system error of the articulated arm coordinate measuring machine in the step S3, the rotation accuracy error, the radial runout error and the axial movement error are added as superposition items of the joint offset, and the rotation accuracy error is taken as the A rotation error term, the radial runout error is a translation error term along the x-axis, and the axial movement error is a translation error term along the z-axis.
[0167] Adjacent two coordinate systems {X i , Y i ,Z i} with {X i-1 , Y i-1 , the homogeneous transformation matrix between Zi-1} is as follows:
[0168] A i =Rot(z i-1 ,θ i )Trans(0,0,d i )Trans(l i ,0,0)Rot(x i ,α i ) (8)
[0169] After adding the axis error, it is equivalent to adding rotation and translation motion on the basis of the original transformation matrix, and the transformation matrix becomes:
[0170] A i =Rot(z i-1 ,θ i )Trans(0,0,d i )Trans(0,0,G i (θ i ))Trans(l i ,0,0) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More