

Intelligent vehicle path planning method for improving artificial potential field algorithm
An artificial potential field and path planning technology, applied in vehicle position/route/height control, navigation calculation tools, two-dimensional position/channel control, etc., can solve the problem of difficult balance between trajectory smoothness and moving steps, calculation It is impossible to adjust the step size and trajectory of moving out of the affected area to achieve the effect of reducing redundant distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The specific embodiments of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
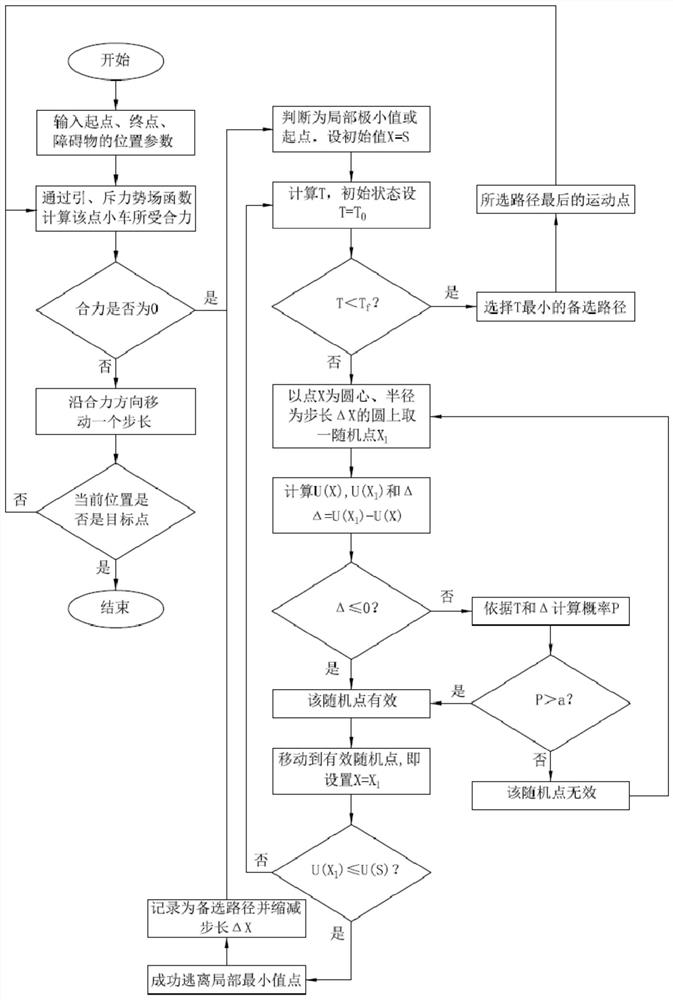
[0045] Such as figure 1 As shown, the present invention provides a smart car path planning method that improves the artificial potential field algorithm, including the following steps.
[0046] Step 1. Collect the starting point, target point, and obstacle position parameters, and set the starting point, end point, and obstacle point in the planned path.
[0047] Step 2. Construct the gravitational potential field function and the repulsive force potential field function according to the positions of the smart car, the target point, and the obstacle point respectively.
[0048] Among them, the gravitational potential field function U c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More