

Three-finger dexterous hand based on full-drive fingers
A dexterous hand and full-drive technology, applied in the field of robotics, can solve problems such as reducing the reachable space of fingers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to further explain the technical solution of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings.
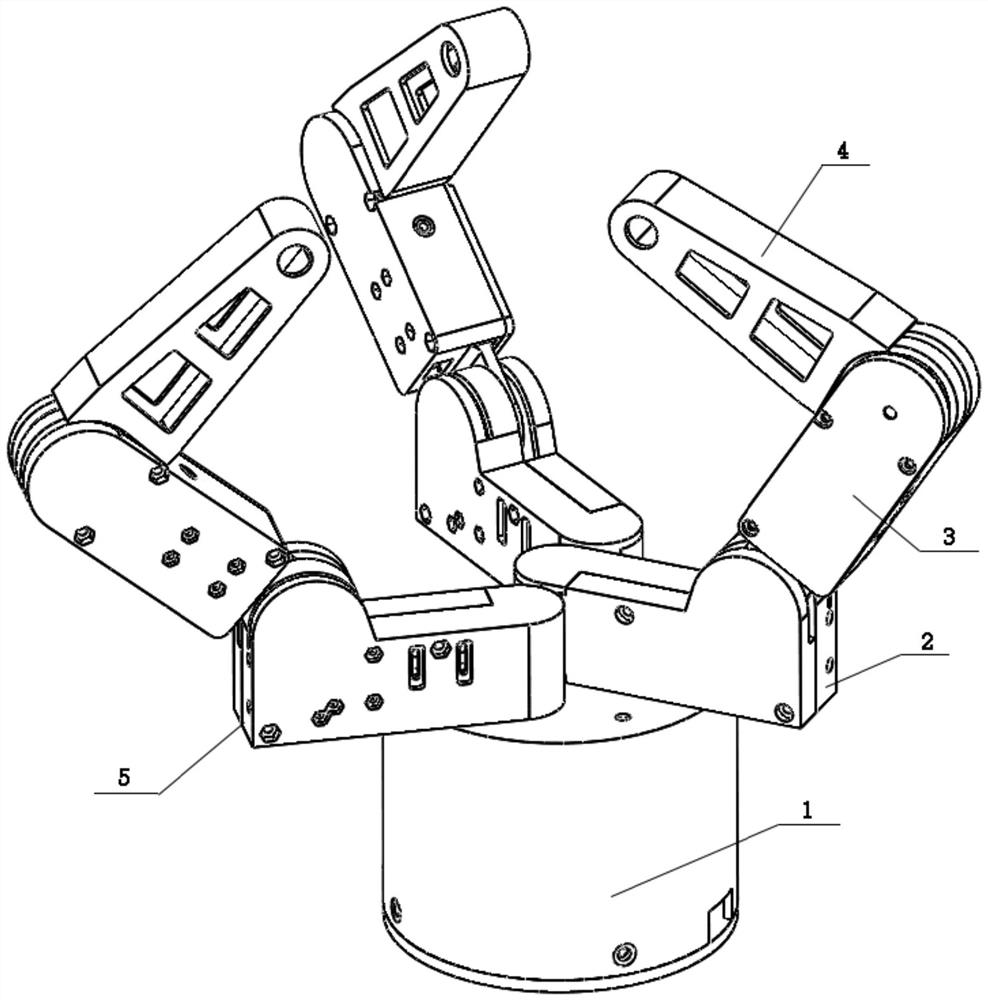
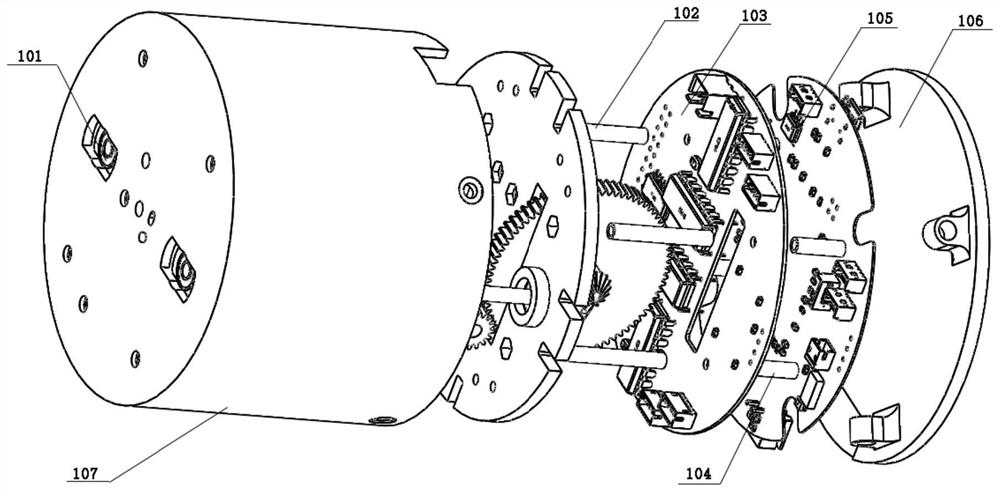
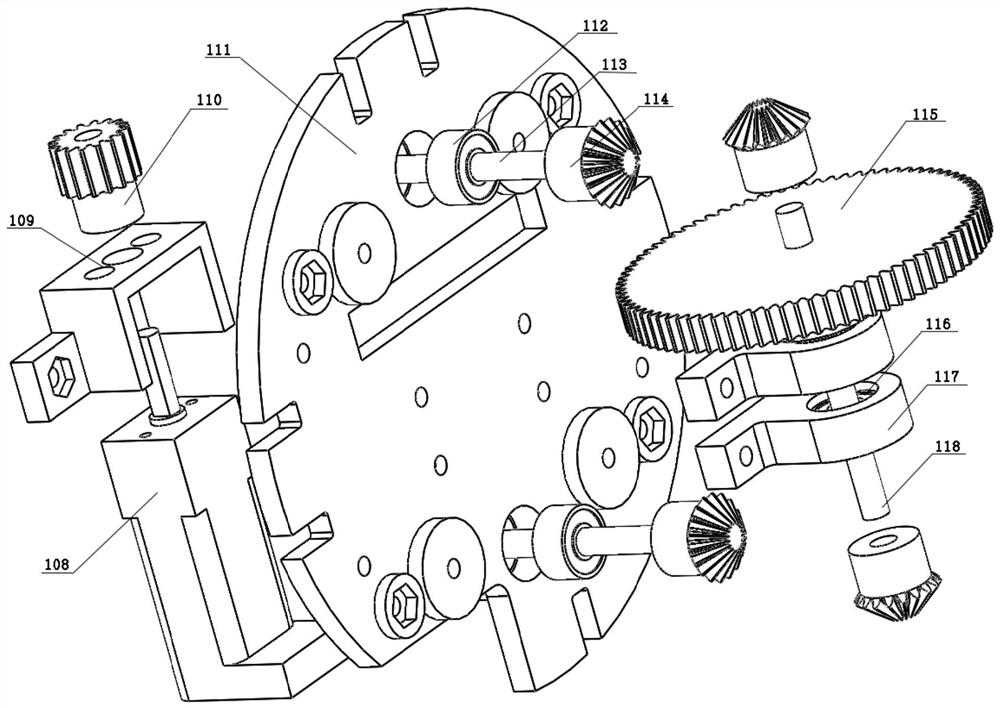
[0037] Such as Figure 1-Figure 12 As shown, a three-finger dexterous hand based on fully driven fingers mainly includes a base assembly 1, a fixed finger seat assembly 2, a finger middle link assembly 3, a finger end link assembly 4, and a movable finger seat assembly 5. The base assembly 1 includes a 693ZZ bearing 101, a long copper column 102, a motor drive circuit board 103, a short copper column 104, a main control circuit board 105, a base lower shell 106, a base upper shell 107, and an encoder Geared motor 108, geared motor bracket 109, 0.5 mold 16-tooth spur gear 110, gear bearing support plate 111, 693ZZ bearing 112, 3mm diameter shaft A113, 0.5 mold 18-tooth bevel gear 114, 0.5 mold 80-tooth spur gear 115, 693ZZ Bearing 116, gear bearing seat 117, 3mm diameter shaft B118; fixed f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More