

Hybrid lane-changing decision-making method for emergency vehicles based on reinforcement learning and avoidance strategy
An emergency vehicle and reinforcement learning technology, applied in the direction of neural learning methods, biological neural network models, control devices, etc., can solve the problems of not making full use of real-time traffic data, not considering the impact of normal traffic flow, ignoring the delay of response time, etc., to achieve Improve data utilization, have both stability and exploratory, and stimulate the effect of intelligent agent learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0172] The following is a detailed description of the effect of the present invention on the decision-making of intelligent network emergency vehicle sections through specific examples:
[0173] 1. First of all, the reinforcement learning part of the algorithm has achieved a good convergence effect, such as Figure 4 As shown, it is described that the effect of the loss function value tending to zero after nearly 200,000 steps of training is significant;
[0174] 2. During the training process, monitor the speed convergence of the DQN strategy and the "DQN+avoidance" hybrid strategy, such as Figure 5 As shown, all can converge to a lower transit time than the baseline (the default car-following model: shown by the dotted line in the figure);
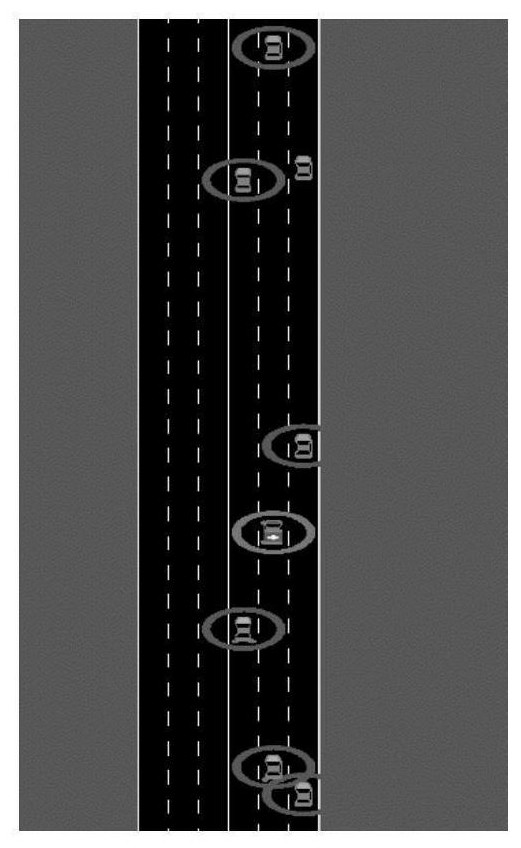
[0175] 3. The mixed strategy should have been more stable, but if Figure 5 It can be seen that this is not the case, and often occurs as Image 6 In the scenario shown, the vehicle in front continues to perform evasive actions due t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More