Target object pose determination method and device, storage medium and electronic equipment
A target object, pose technology, applied in the field of robotics and computer vision, can solve the problem of low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0149] 1. A method for determining the pose of a target object, comprising:
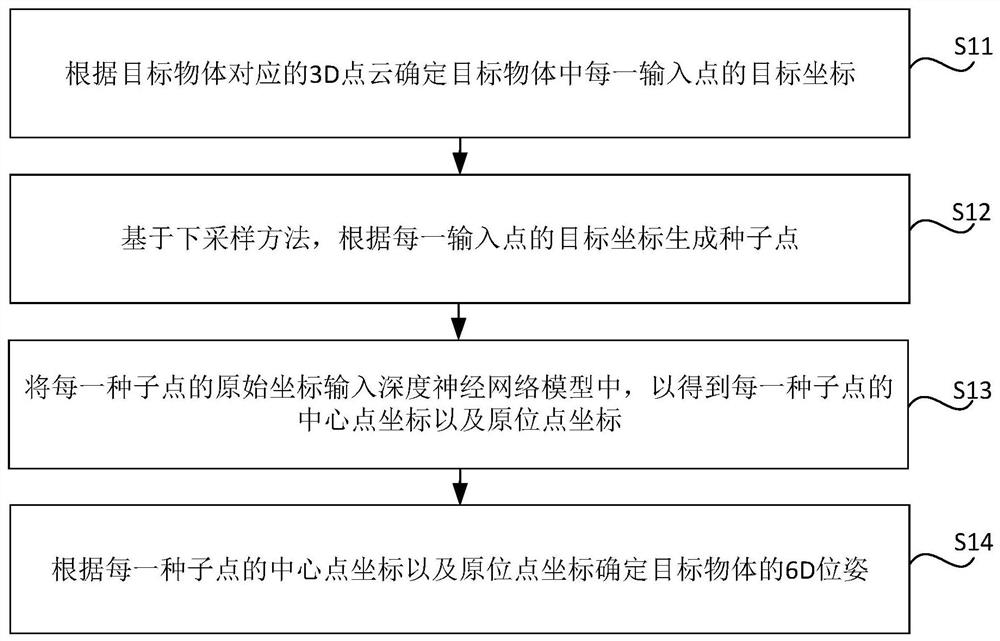
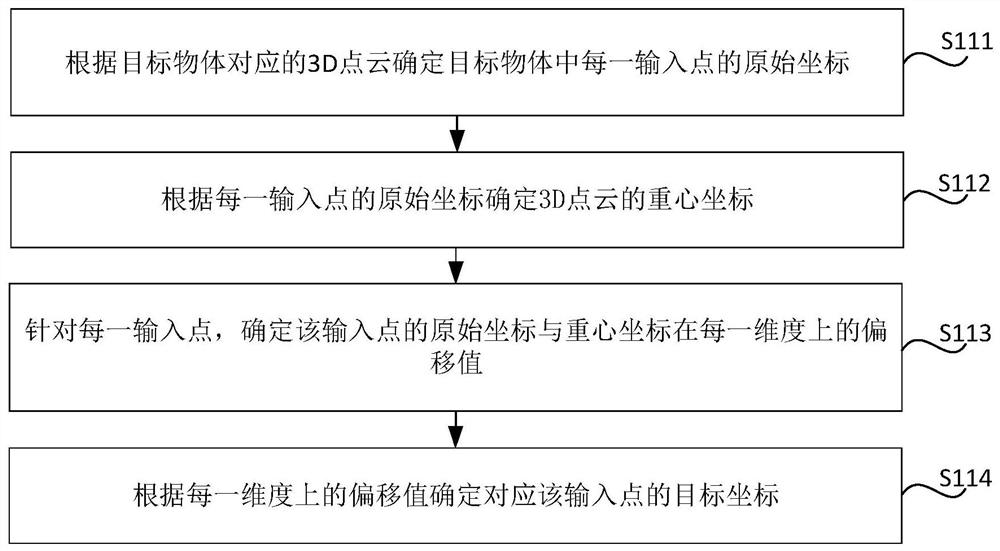
[0150] determining the target coordinates of each input point in the target object according to the 3D point cloud corresponding to the target object;
[0151] Based on the down-sampling method, generating seed points according to the target coordinates of each input point;
[0152] Inputting the original coordinates of each of the seed points into the deep neural network model to obtain the center point coordinates and the original point coordinates of each of the seed points;
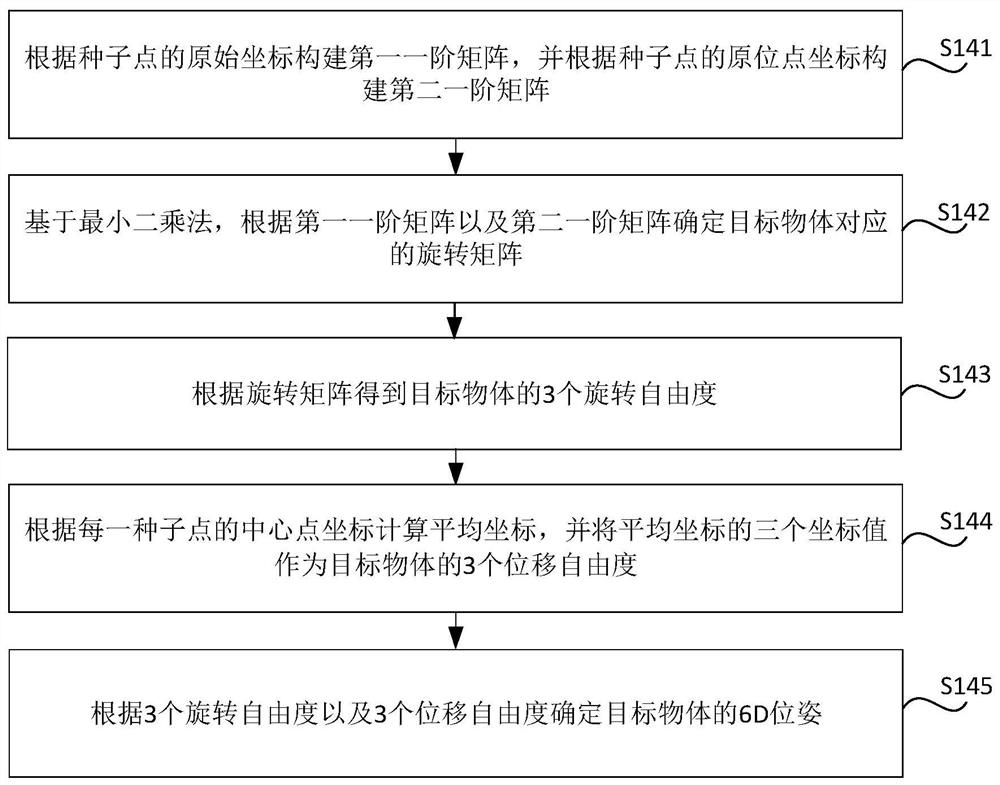
[0153] The 6D pose of the target object is determined according to the center point coordinates and the home point coordinates of each of the seed points.
[0154] 2. The method according to embodiment 1, wherein the deep neural network model generates the center point coordinates and the original point coordinates of each of the seed points in the following manner:
[0155] determining a displacement deviation and a rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com