A high-precision multi-axis clock synchronization method based on ethercat
A clock synchronization, high-precision technology, applied in the direction of comprehensive factory control, program control, instruments, etc., can solve the problems of communication asynchrony, communication cycle fluctuation, and the inability to achieve multi-axis high-precision synchronization, etc., to improve synchronous response and control The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
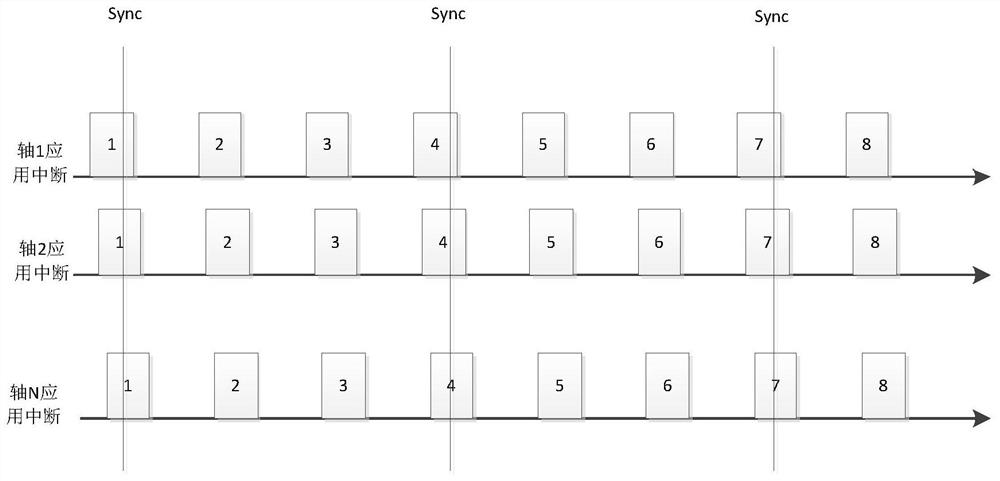
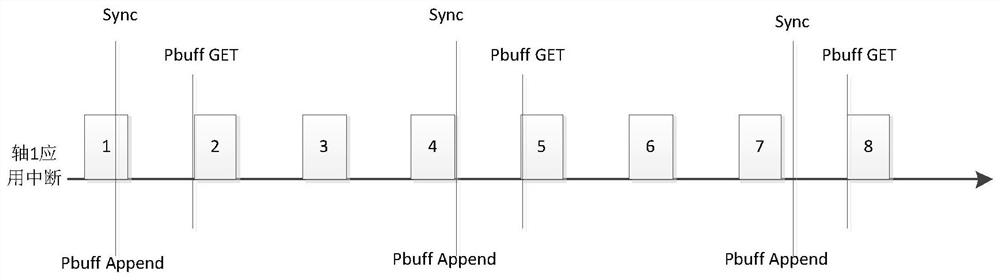
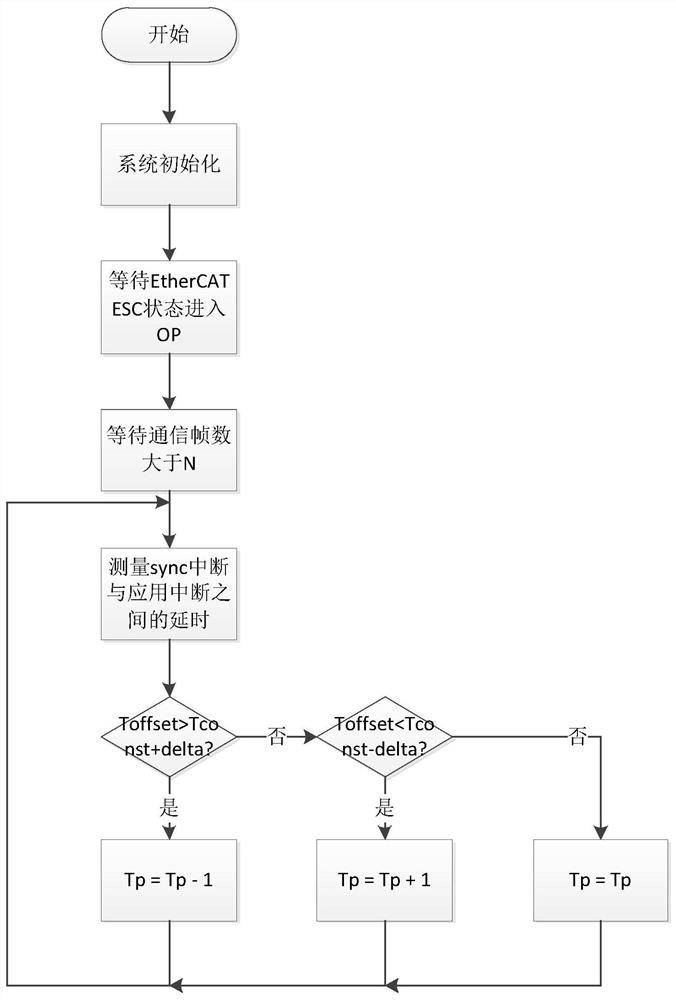
[0047] A high-precision multi-axis clock synchronization method based on EtherCAT, comprising the following steps: setting the time measurement module, opening the time measurement module, measuring the time between the EtherCAT SYNC interrupt and the execution of the application layer, and then inputting the above-mentioned measured time to the clock synchronization The correction algorithm module corrects the clock, corrects the application layer time through the clock synchronization correction algorithm module, and performs the above operations on each axis respectively, and finally makes the execution interval between the application layer execution interrupt and the EtherCAT SYNC interrupt execution interval of all axes a fixed value, so as to realize the multi-axis clock The effect of synchronization.
[0048] Using the above method, in the 10-axis servo system, the Toffset error range of each axis is within 0.1us, and the high-precision clock synchronization of each axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com