

Adaptive augmentation control theory-based three-axis full authority control method for flying wing unmanned aerial vehicle
A technology of full authority control and control theory, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as static instability of heading, easy drift, strong nonlinear characteristics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings.
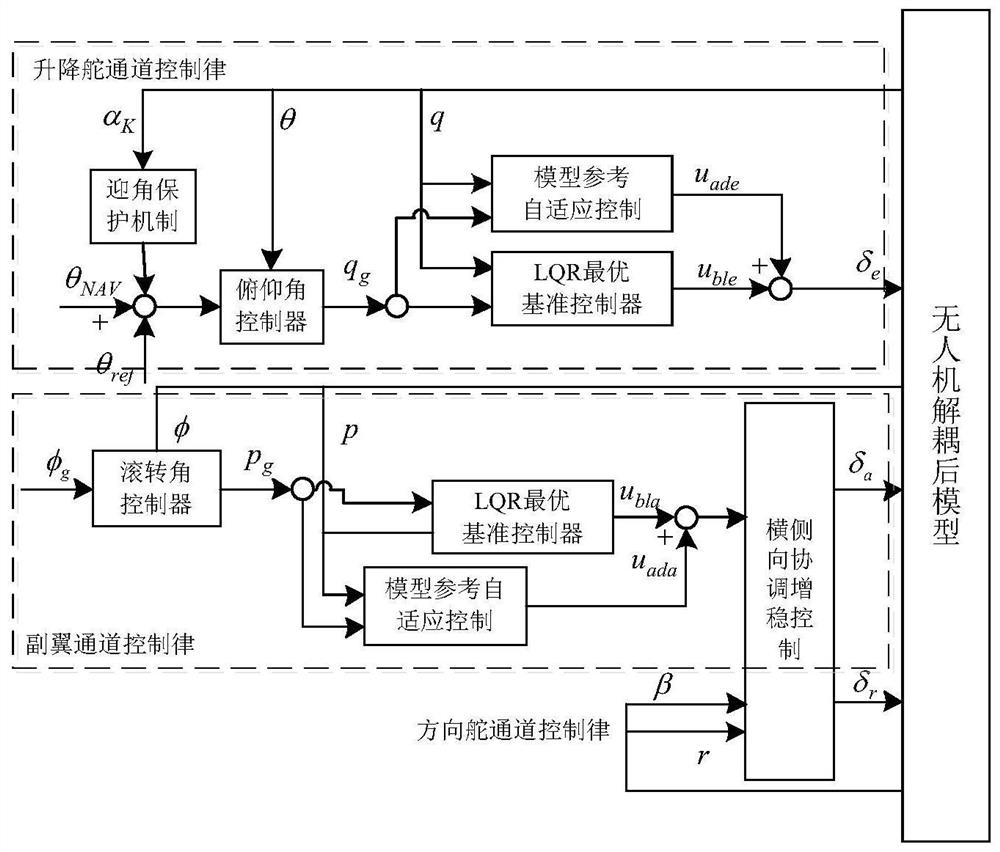
[0073] A three-axis full-authority control method for a flying-wing unmanned aerial vehicle based on adaptive augmented control theory, comprising the following steps:
[0074] Step S1. Based on the UAV dynamics model, a feed-forward decoupling compensation controller is designed to offset the angular rate coupling among the three channels of roll, pitch and yaw.
[0075] The mathematical expression of the UAV angular dynamics equation is:
[0076]
[0077] write the formula as ω is the three-axis attitude angular velocity of the UAV, I is the moment of inertia matrix, S(ω) is the matrix related to the attitude angular velocity, M′ is the three-axis aerodynamic moment, which contains the aerodynamic coupling to be compensated, - S(ω)Iω is the inertial coupling to be compensated. The specific form of ω, I, S(ω), M′ is as follows:
[0078]
[0079] Where p, q,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More