

Multi-rotor unmanned aerial vehicle motor inclination angle and installation tolerance constraint determination method
A multi-rotor unmanned, method-determined technology, applied in the direction of non-electric variable control, instrument, attitude control, etc., can solve the problems of insignificant quality improvement, loss of motor tension, and influence on pitch and roll channel attitude control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
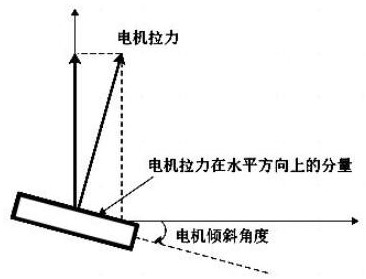
[0069] Such as figure 1 As shown, the yaw control principle of the multi-rotor is to use the reaction torque (reverse torque) of the motor to generate the yaw moment, and then form the yaw motion. When the motor is installed horizontally, the yaw torque is small and the yaw response is slow. Therefore, the strategy of motor tilt is adopted to generate yaw torque by using the component of the motor pulling force in the horizontal direction, and superimposed with the counter torque of the motor to produce the final Yaw moment to speed up yaw response.
[0070] It should be noted that before determining the inclination angle of the motor and the installation tolerance range of the inclination angle, carry out horizontal calibration and magnetic compass calibration, and keep the drone in a full-load hovering state to ensure that the environment is windless and magnetically disturbed, and the consistency of the propellers passes.
[0071] Based on the model parameters of a plant p...
Embodiment 2
[0099] On the basis of the first embodiment above, the steps of obtaining the motor installation tolerance in this embodiment are as follows:
[0100] Constraints: In the hovering state, the maximum speed difference between positive and negative propellers caused by compensating for motor installation tolerances is ±2.5%, and the motor tilt angle is 5.5°.
[0101] The tension required for a single axis hovering with full load is
[0102]
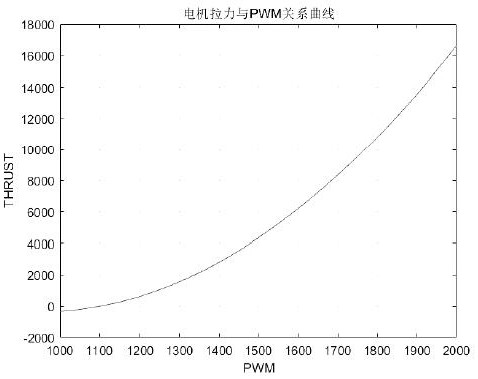
[0103] According to the throttle pull curve, the standard throttle pwm is 1741 at this time.
[0104] Assuming that the consistency of the positive and negative propellers is good, ignoring the influence caused by the unbalanced tension and torque, when the flight control output speed difference is ±2.5% as the inspection standard, it can be seen that the positive and negative propellers deviate from each other by 2.5% to both sides of the reference throttle pwm, that is, 25us The pwm value, the pwm changes as follows:
[0105]
[01...
Embodiment 3
[0124] This embodiment provides the comparison test when the motor is horizontal and when the motor is inclined at 5.5 degrees. Figure 7 It shows that the yaw angular acceleration reaches the maximum constraint condition when the inclination angle of the motor is not added At this time, the pwm values of the four motors, among which the difference between No. 1 and No. 3 motors and No. 3 and No. 4 motors is 400us, that is, the deviation reaches ± 20%, which does not meet the design requirements.
[0125] Figure 8When adding a 5.5° motor tilt angle, the yaw angular acceleration reaches the maximum constraint condition When the pwm value of the four motors, the difference between No. 1 and No. 3 motors and No. 3 and No. 4 motors is 220us, that is, the deviation reaches ±11%, which meets the design requirements.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More