

Device for simulating microgravity environment object carrying training and friction torque compensation method thereof
A technology for simulating microgravity and friction, which is applied in the simulation devices of space navigation conditions, transportation and packaging, and space navigation equipment. , the effect of efficient training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
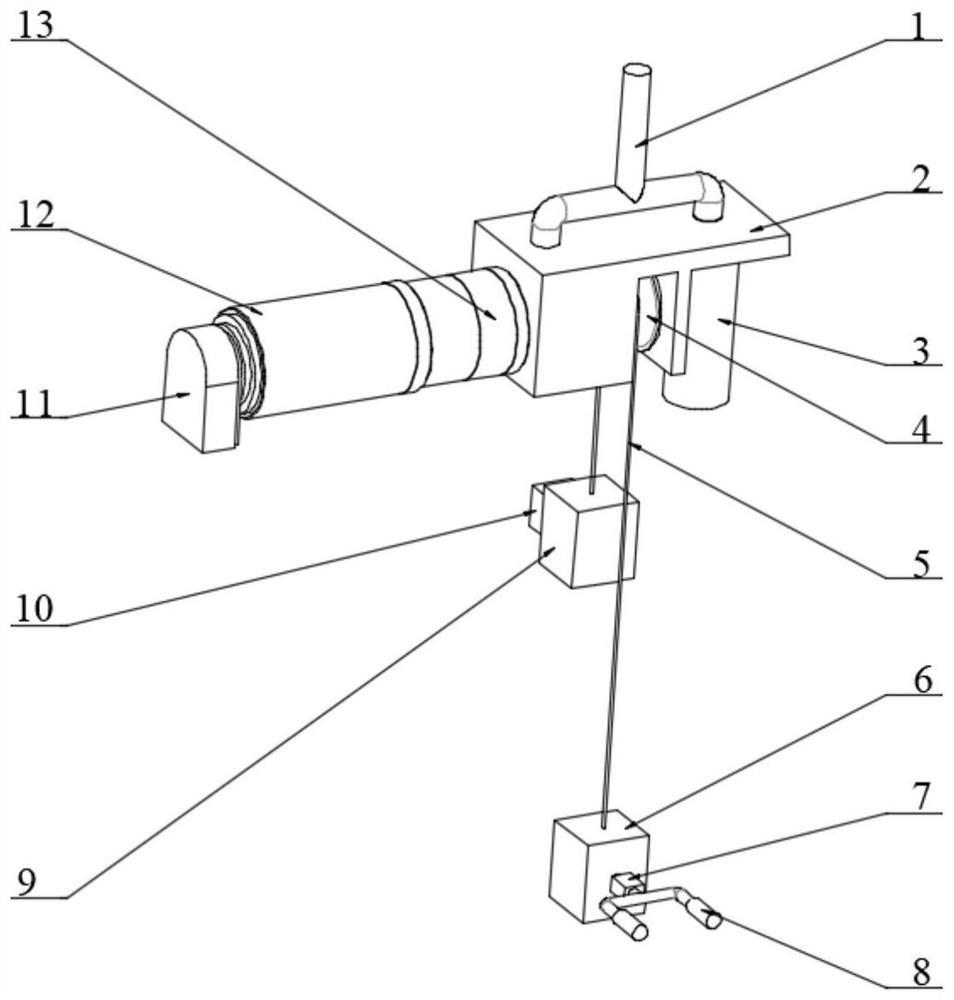
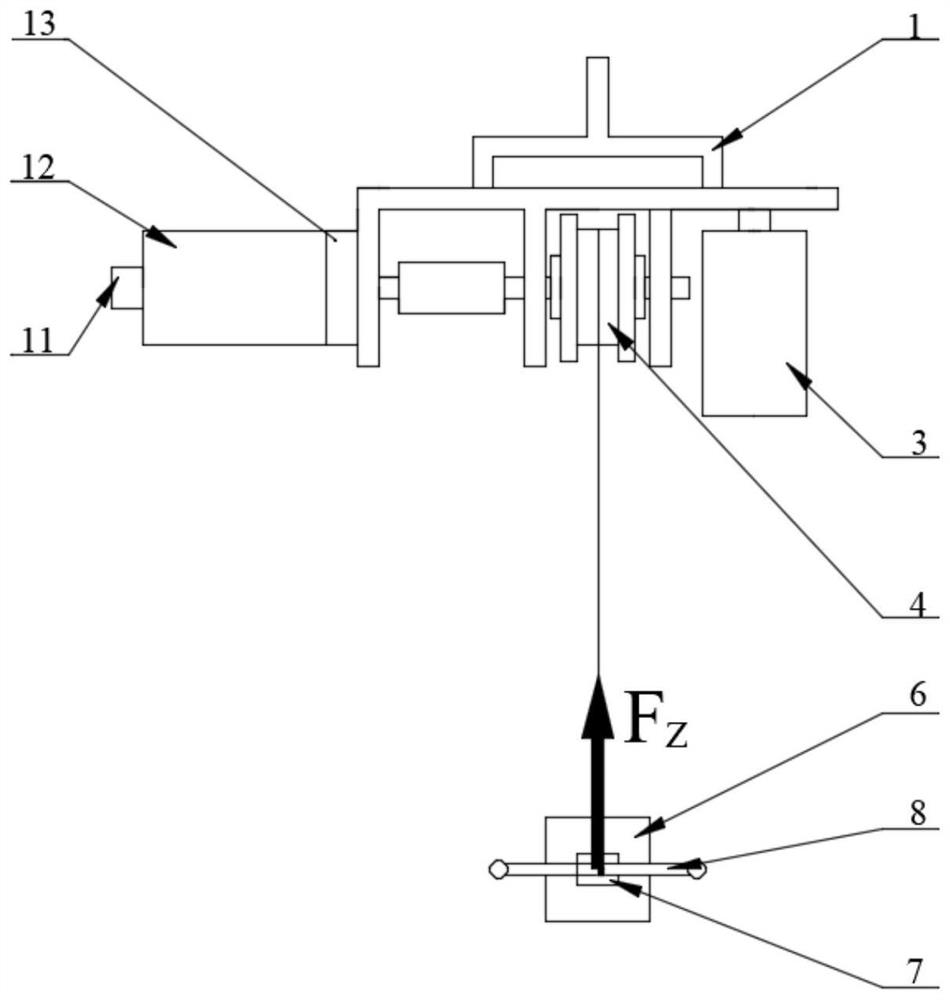
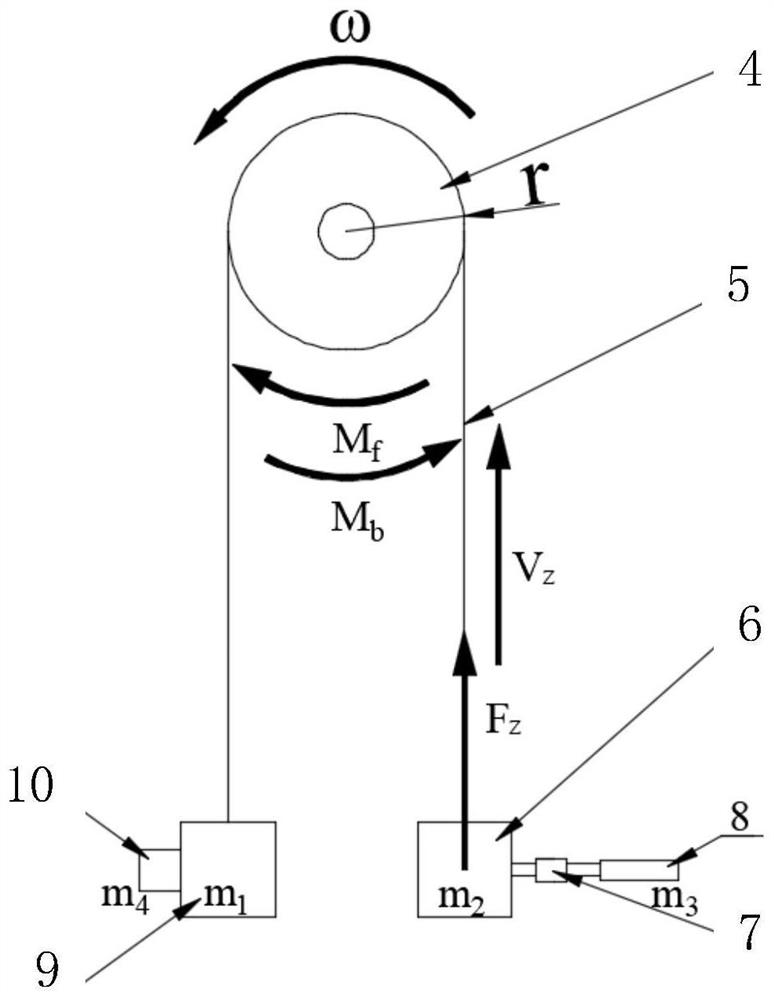
[0016] combine Figure 1 to Figure 5 , a kind of simulated microgravity environment carrying training device of the present invention (hereinafter referred to as " training device "), comprise the main support rod 1 that is used to suspend training device, be used to install the pulley platform 2 of friction compensating motor and pulley, pulley Platform counterweight 3, pulley 4, wire rope 5, simulated load 6, multi-dimensional force sensor 7, handle 8, simulated load counterweight 9, handle counterweight 10, encoder 11, friction compensation motor 12, motor brake 13 . The main support bar on the pulley platform bears all the gravity (all mass) of the training device. After the power is turned on, the friction compensation motor is in working condition to offset the friction torque generated by the pulley shaft and supporting bearin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More