

Four-rotor traction type obstacle-crossing wall-climbing cleaning robot
A cleaning robot and traction technology, applied in the field of robots, can solve the problems of discontinuous movement, low cleaning efficiency, and inability to perform continuous movement, and achieve the effect of improving the efficiency of obstacle crossing and cleaning efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] The present invention will be further described below in combination with specific embodiments. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
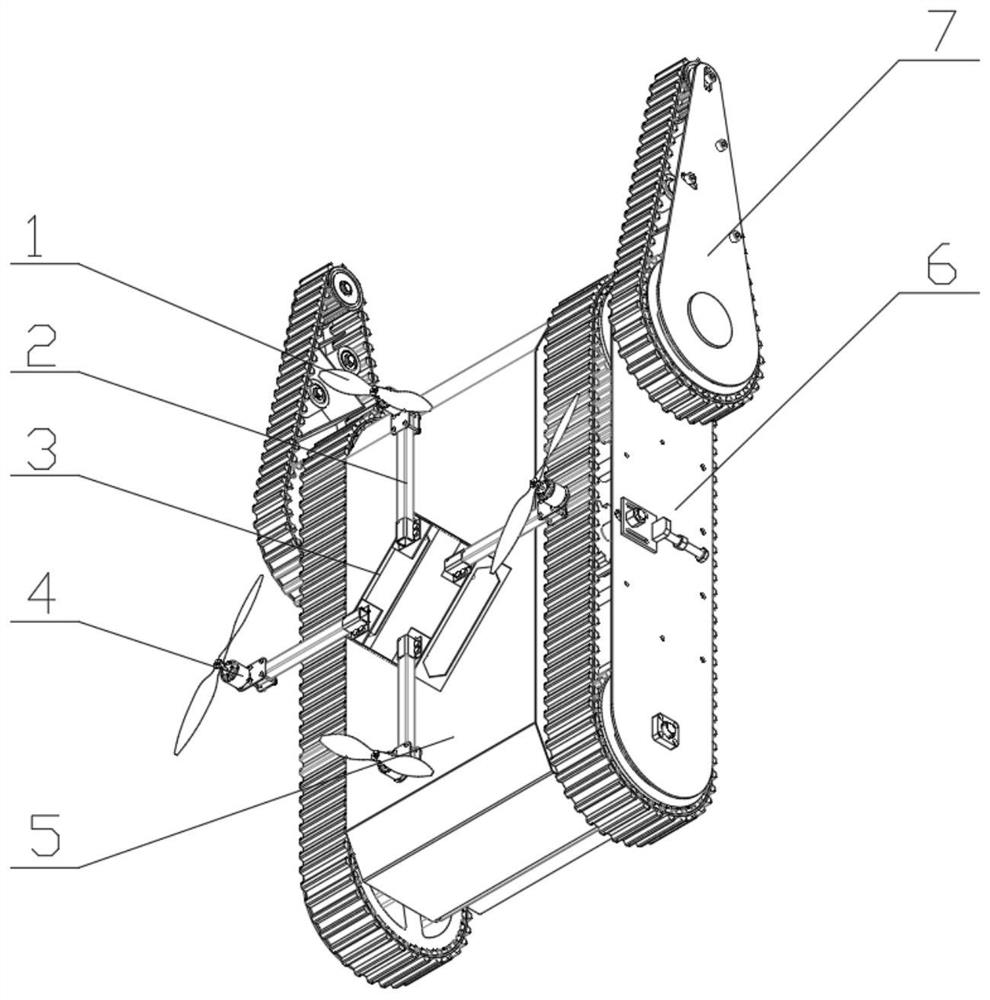
[0037] A four-rotor towed obstacle-climbing cleaning robot, such as Figure 1~5 As shown, it includes a traveling mechanism, a swing arm mechanism, a thrust mechanism, a cleaning mechanism and a large-capacity charging module 9 arranged in the robot body.
[0038]Traveling mechanism comprises the walking unit that is symmetrically arranged at both sides of robot body, and walking unit comprises driving wheel 21, main id...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More