

Deep learning method for gait control of lower limb rehabilitation robot
A rehabilitation robot and gait control technology, applied in the field of rehabilitation robots, can solve the problems of reducing the rehabilitation effect of the lower limb rehabilitation robot, poor adjustment accuracy, and inability to be effectively adjusted by the user, so as to improve the rehabilitation effect, ensure stability, and reduce the computational burden. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
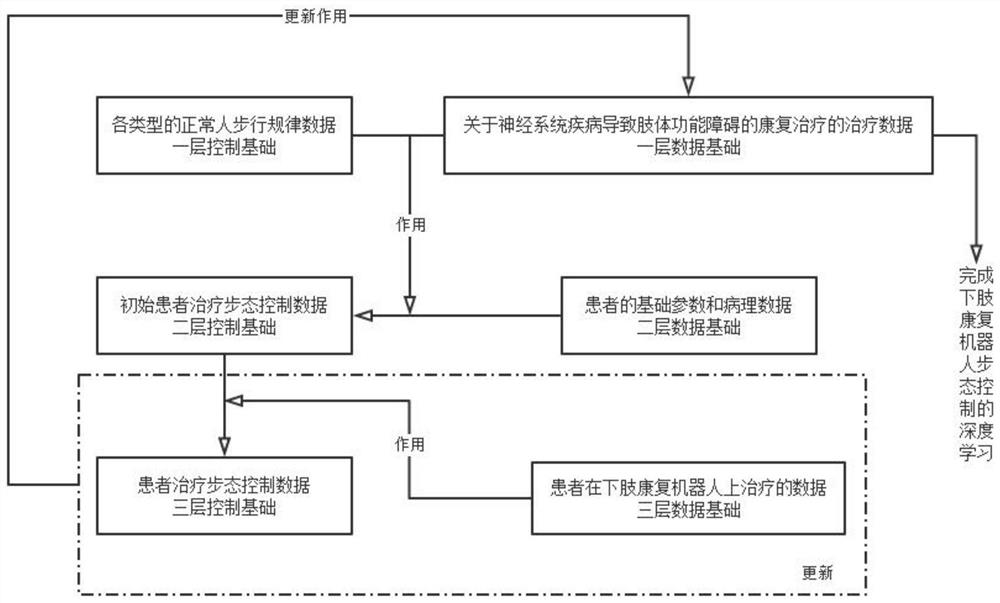
[0056] see Figure 1-5 , a deep learning method for gait control of lower limb rehabilitation robots, including the following steps:
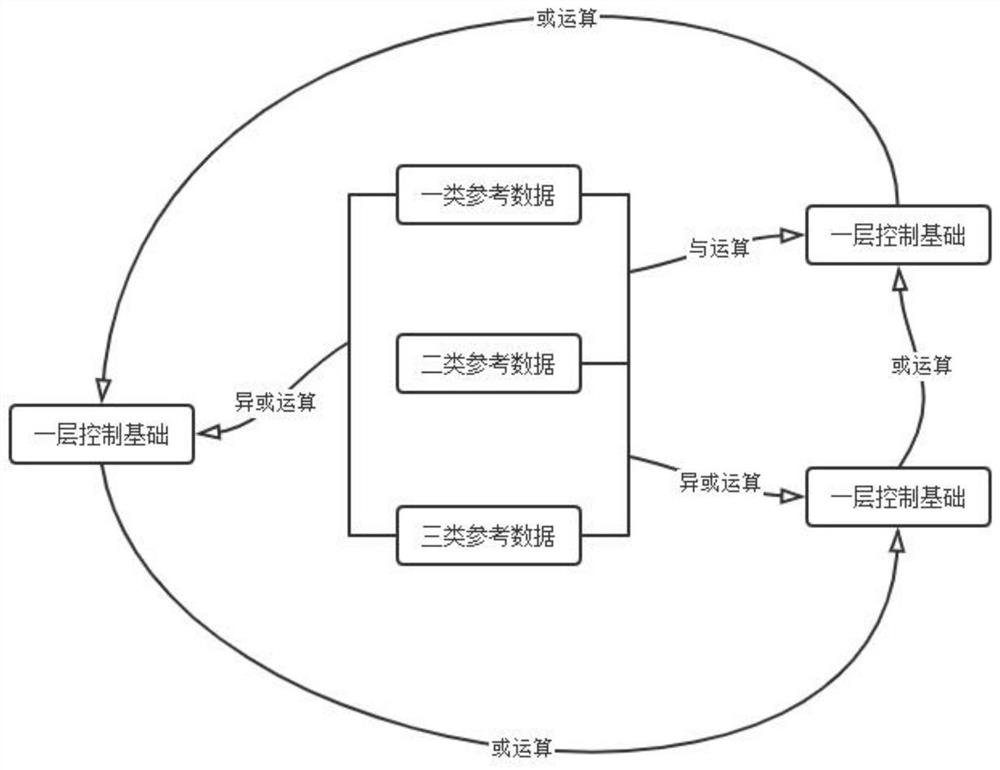
[0057] S1. Input the data about the walking patterns of various types of normal people as a layer of control basis;
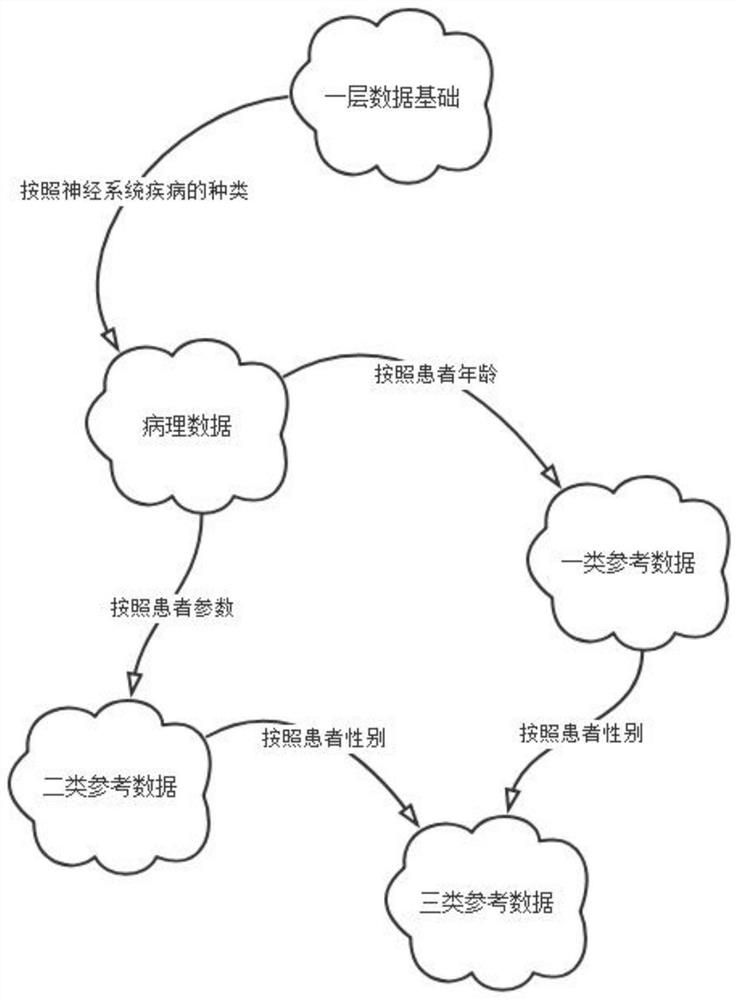
[0058] S2. Input the treatment data about the rehabilitation treatment of limb dysfunction caused by nervous system diseases as a layer of data basis;
[0059] S3. Input the patient's basic parameters and pathological data as the basis of the second-tier data;
[0060] S4. Combine the first-level control basis and the first-level data basis with the second-level data basis to form the initial patient treatment gait control data as the second-level control basis;
[0061] S5. Input the data of patients treated on the lower limb rehabilitation robot as the three-layer data basis;
[0062] S6. Through the basic function of the three-tier data and the second-tier control basis, the patient's treatment gait control data is formed ...
Embodiment 2
[0075] see Figure 1-7 , where the same or corresponding components as those in Embodiment 1 use the corresponding reference numerals as in Embodiment 1, and for the sake of simplicity, only the differences from Embodiment 1 will be described below. The difference between this embodiment 2 and embodiment 1 is: please refer to Image 6 with Figure 7 , a control method for deep learning of lower limb rehabilitation robot gait control, comprising the following steps:
[0076] S1. Input the parameters of the patient to be treated into the treatment system of the lower limb rehabilitation robot, and the gait control system generates a simulated treatment plan;
[0077] S2. Control the lower limb rehabilitation robot to treat patients, and the gait control system performs deep learning on the treatment data;
[0078] S3. The gait control system after deep learning sends the learning data to the treatment system of the lower limb rehabilitation robot, and improves the simulated t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More