SLAM positioning and navigation method and system based on multi-sensor fusion
A multi-sensor fusion, positioning and navigation technology, applied in navigation calculation tools, radio wave measurement systems, instruments, etc., can solve the problems of low detection accuracy of obstacle boundaries, decreased real-time performance, and low accuracy of pose and attitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
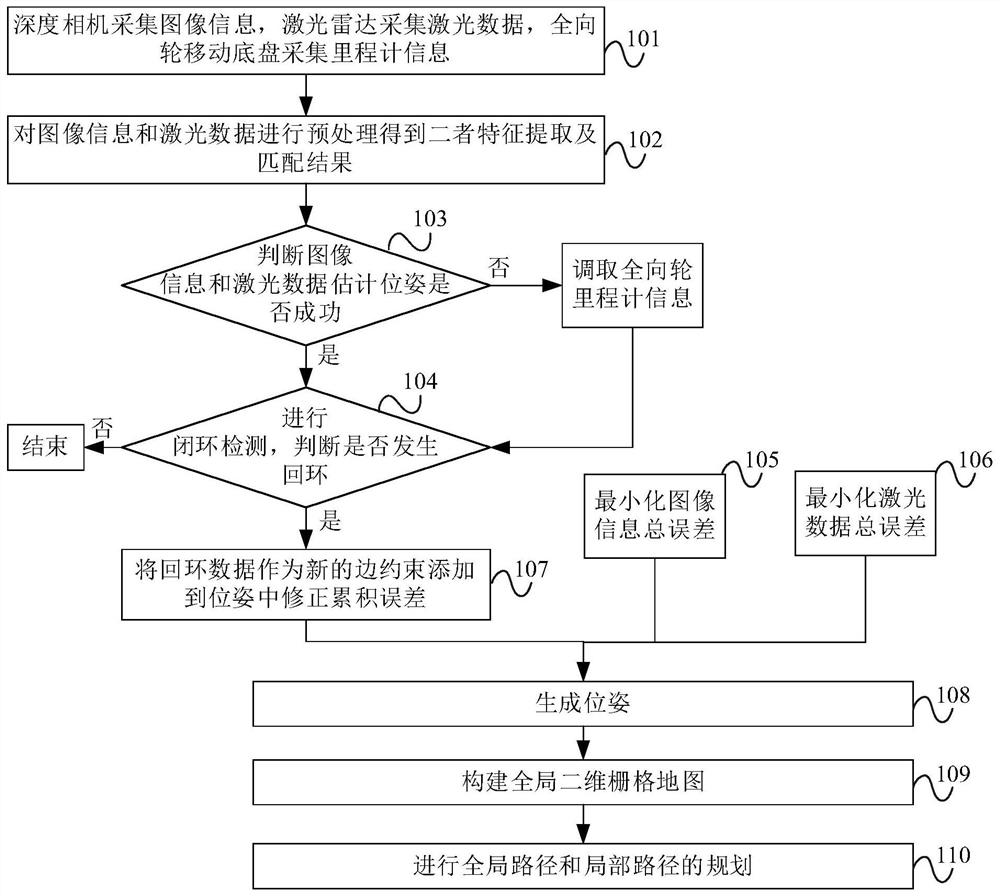
[0044] A SLAM positioning and navigation method based on multi-sensor fusion, the specific implementation steps are as follows figure 1 shown, including:
[0045] Step 101, the depth camera collects image information, the laser radar collects laser data, and the omnidirectional wheel mobile chassis collects odometer information.
[0046] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More