

Orthogonal configuration six-degree-of-freedom vibration simulation system and method of full-vertical actuator
A technology for simulating systems and actuators, applied in vibration testing, testing of machines/structural components, measuring devices, etc., can solve problems such as bulky and complex structures, and achieve good output linearity, fast response, and high reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The invention will be described in detail below with reference to the accompanying drawings and examples.
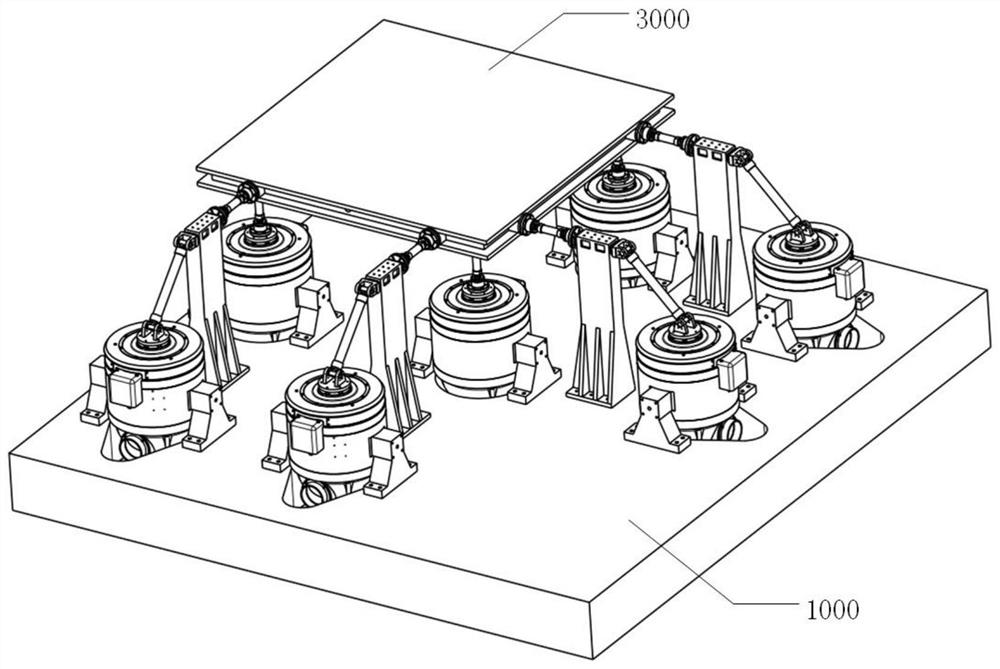
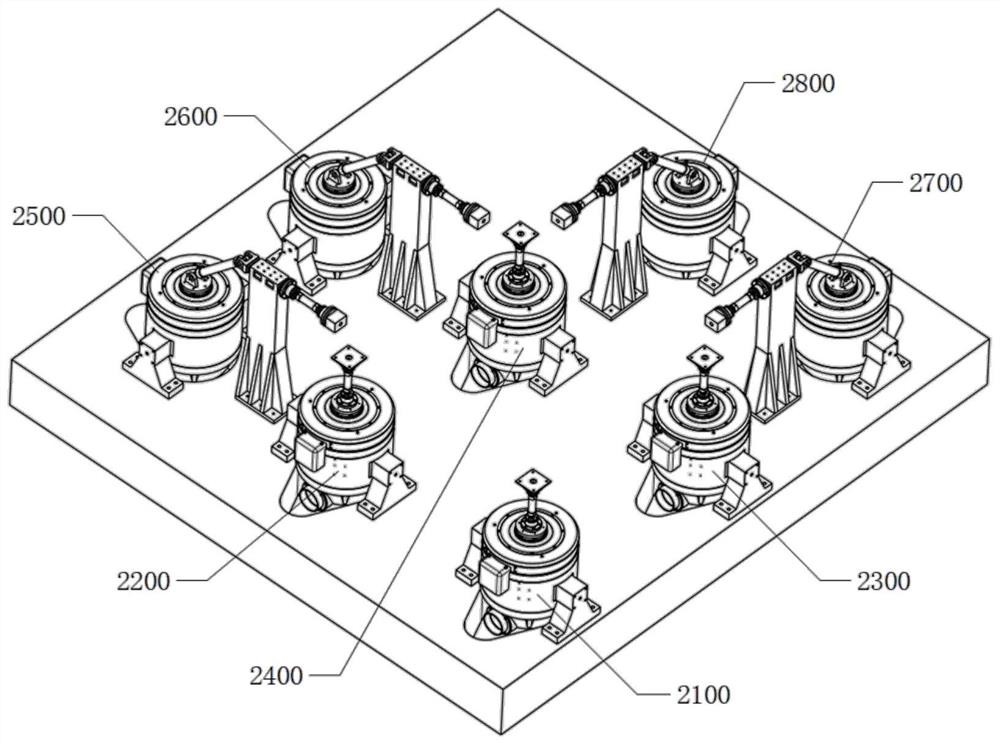
[0084] The orthogonal configuration hexafa vibration simulation system of the full-vertical actuator of the present invention includes upper platform assemblies, eight actuator branches, lower platforms, and real-time control hardware systems; upper platform components and lower platforms Eight actuator branches, four vertical output actuator branches are located below the upper platform, and the other four tilt output actuator branches are divided into two groups, which are arranged on both sides perpendicular to each other. All actuators are installed in the vertical direction, and the four actuators under the upper platform output the active force in the vertical direction, and the driving force of the four actuators on the side passes through the guide slider mechanism to the horizontal direction, eight The actuator branch receives the control of the real-time con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More