

Iterative learning formation control method for discrete multi-agent system under random test length
A multi-agent system and iterative learning technology, which is applied in the field of iterative learning formation control of discrete multi-agent systems under random trial length, can solve the problems of not considering the same length of iterative learning trial and the difficulty of solving the gain matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described below in conjunction with the accompanying drawings and examples. It should be understood that the following examples are intended to facilitate the understanding of the present invention, and have no limiting effect on it. This embodiment takes the iterative learning formation control of multiple UAVs as an example.
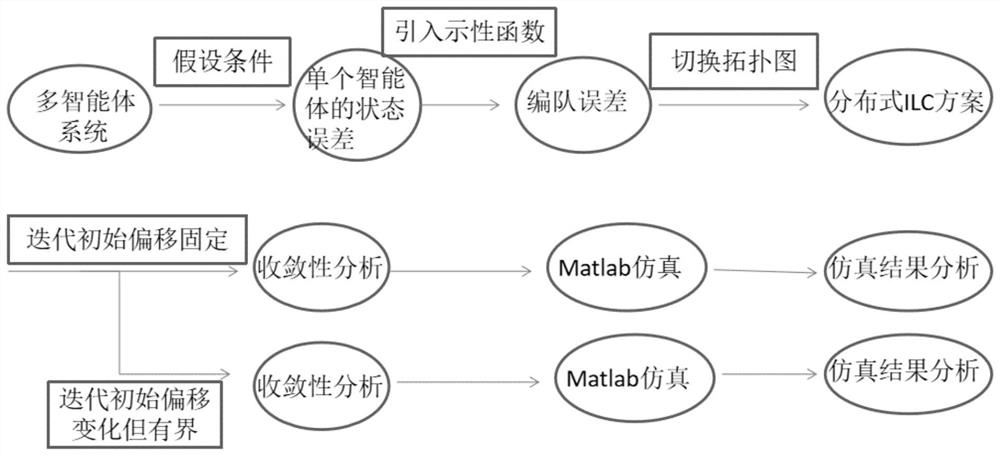
[0072] Such as figure 1 As shown, the iterative learning formation control method for the discrete multi-UAV system under the random trial length provided in this embodiment includes the following steps:
[0073] S1: Transform the control problem of multi-UAV coordinated tracking into a stability control problem of tracking error within a certain period of time. The specific process is as follows:
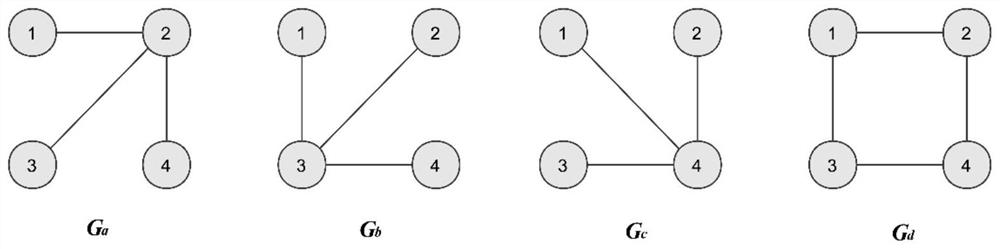
[0074] S11: Apply the directed graph in algebraic graph theory to simulate the interaction topology between multiple UAVs;
[0075] make is a weighted directed graph with order n, where V={v 1 ,...,v n} is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More