

Trajectory deviation rectification method and device and automatic driving guide vehicle
A technology for guiding vehicles and trajectories, which is applied to motor vehicles, transportation and packaging, non-electric variable control, etc., and can solve problems such as vehicle derailment and wheel slippage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] According to an embodiment of the present invention, an embodiment of a trajectory correction method is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, although in The flowcharts show a logical order, but in some cases the steps shown or described may be performed in an order different from that shown or described herein.
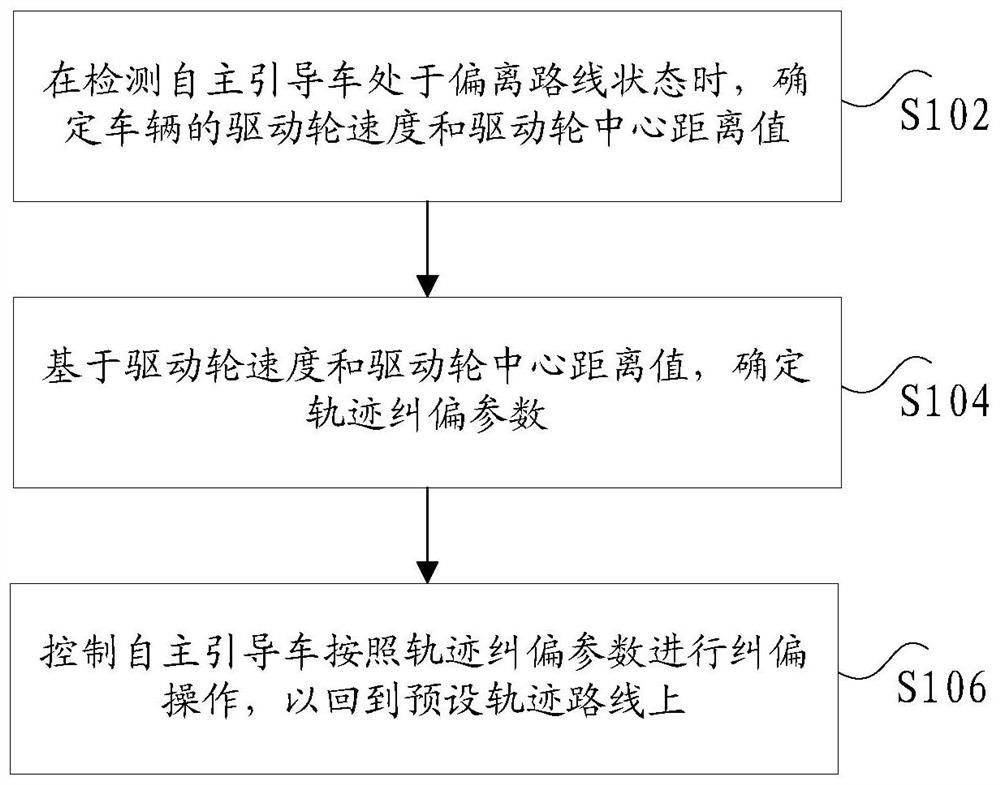
[0026] figure 1 is a flow chart of an optional trajectory correction method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0027] Step S102, when detecting that the autonomous guided vehicle is in a state of deviating from the route, determine the driving wheel speed and driving wheel center distance value of the vehicle;
[0028] Step S104, based on the driving wheel speed and the driving wheel center distance value, determine the tr...
Embodiment 2
[0053] The embodiment of the present invention relates to a track deviation correction device, and the multiple implementation units included in the device correspond to the implementation steps in the first embodiment above.
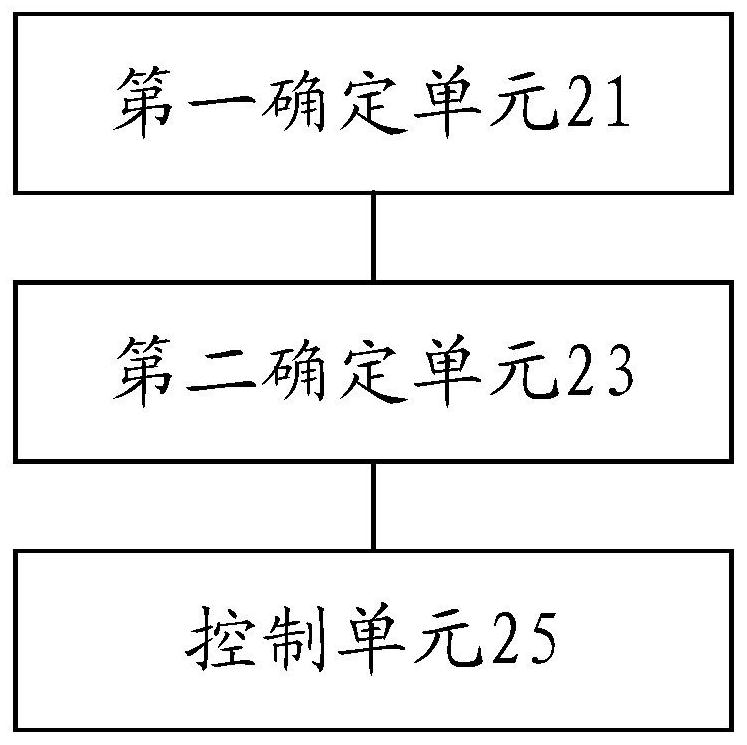
[0054] figure 2 is a schematic diagram of an optional trajectory correction device according to an embodiment of the present invention, such as figure 2 As shown, the trajectory correction device may include: a first determination unit 21, a second determination unit 23, and a control unit 25, wherein,
[0055] The first determination unit 21 is used to determine the driving wheel speed and driving wheel center distance value of the vehicle when detecting that the autonomous guided vehicle is in a state of deviating from the route;
[0056] The second determination unit 23 is used to determine the trajectory correction parameter based on the driving wheel speed and the driving wheel center distance value;
[0057] The control unit 25 is used to cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More