

Robot sensor-free collision detection method and application based on time series analysis
A technology of collision detection and timing analysis, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as real-time deterioration, mechanical structure complexity cost, and increased control system complexity, so as to eliminate sensitivity differences and ensure Effects of detection accuracy and reduction of detection delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
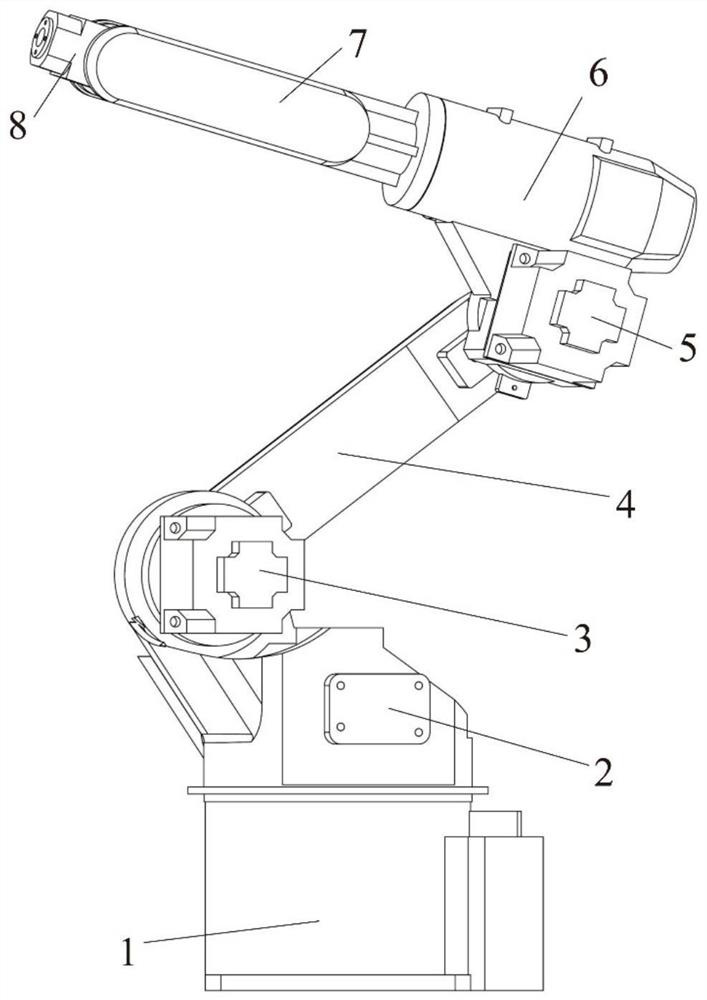
[0080] As shown in Figure 1(a), the robot of this embodiment adopts a series robot, and the specific structure includes: a base 1, a waist 2, a large arm motor 3, a large arm 4, an elbow motor 5, an elbow 6, a small arm 7 and wrist 8;
[0081] Among them, the base 1 is connected with the waist 2, the waist is connected with the big arm 4, the big arm 4 is connected with the elbow 6, the elbow 6 is connected with the small arm 7, the small arm 7 is connected with the wrist 8, the big arm motor 3 is connected with the big arm 4 is connected to drive the big arm 4 to rotate, and the elbow motor 5 is connected to the elbow 6 to drive the elbow to rotate.
[0082] Furthermore, the present invention is not limited to the tandem robot in this embodiment, and the method according to the present invention can be applied to other articulated tandem robots.
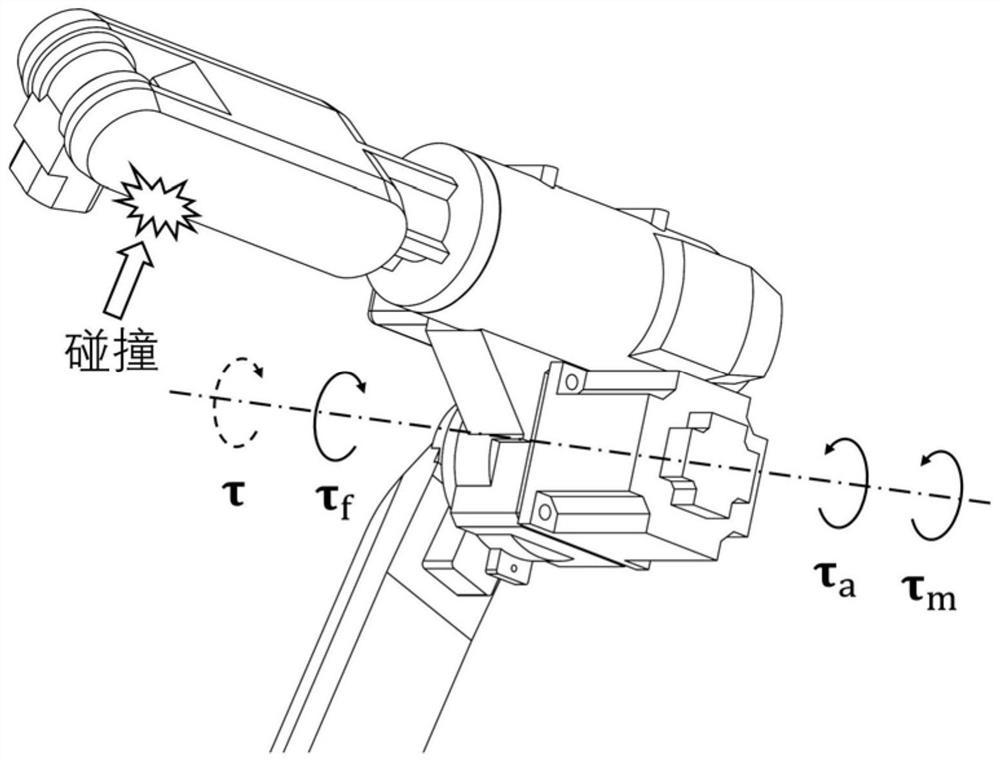
[0083] As shown in Figure 1(b), in this embodiment, taking the motion process of the articulated robot as an example, when there ...
Embodiment 2
[0128] This embodiment provides a sensor-free collision detection system for a robot based on time sequence analysis, including: a state information acquisition module, a joint actual external torque calculation module, an autoregressive model building module, a predicted value generation module, a judgment module, and a joint actual external torque update module;
[0129] In this embodiment, the state information collection module is used to collect the state information of the robot in real time through the servo driver during the movement of the robot, and the state information includes the joint state of the robot joint and the actual torque of the joint;
[0130] In this embodiment, the joint actual external torque calculation module is used to combine the state information and the robot dynamics model to obtain the joint calculated torque, and the joint actual torque is subtracted from the joint calculated torque to obtain the joint actual external torque;
[0131] In th...
Embodiment 3
[0136] This embodiment provides a storage medium. The storage medium may be a storage medium such as a ROM, a RAM, a magnetic disk, an optical disk, etc., and the storage medium stores one or more programs. When the programs are executed by a processor, the time-based implementation of the above Embodiment 1 is realized. A robot sensor-free collision detection method based on sequence analysis.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More