Geometric model non-rigid matching method and device using local and global information
A geometric model and global information technology, applied to computer parts, character and pattern recognition, instruments, etc., to achieve the effect of fast speed, improved accuracy and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
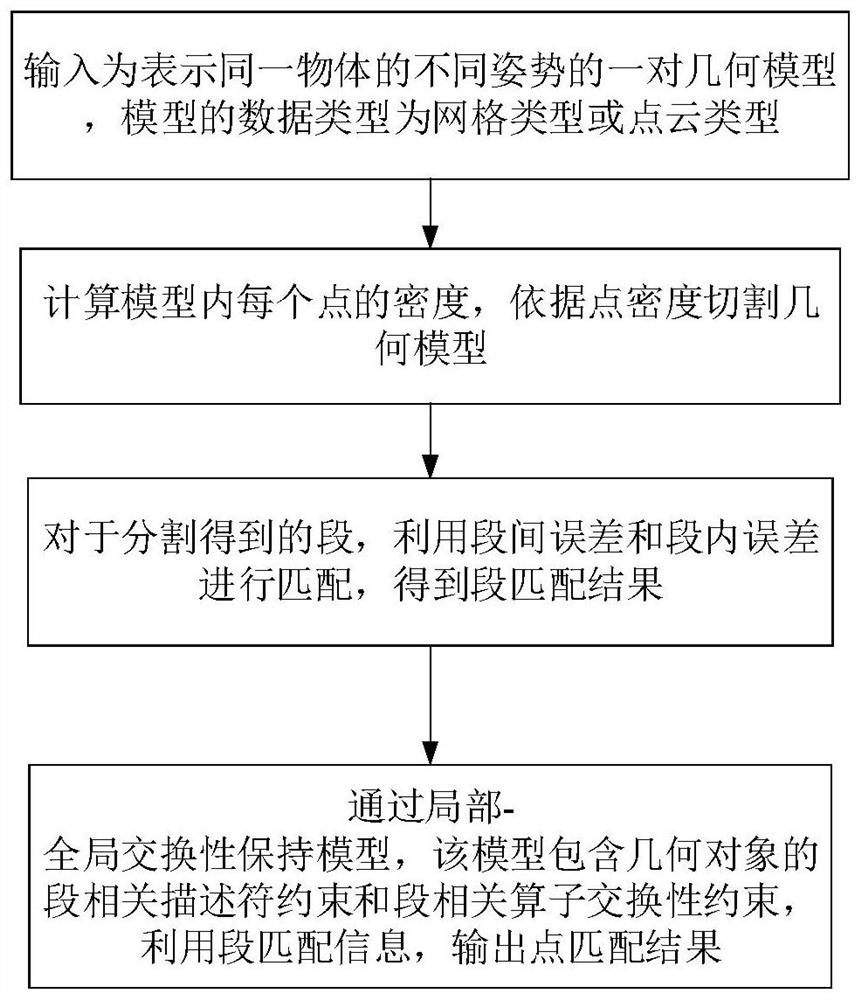
[0026] Such as Figure 4 As shown, this non-rigid matching method of geometric models using local and global information includes the following steps:
[0027] (1) The input is a pair of geometric models representing different poses of the same object, and the data type of the model is a grid type or a point cloud type;
[0028] (2) Calculate the density of each point in the model, and cut the geometric model according to the point density;
[0029] (3) For the segments obtained by segmentation, use the inter-segment error and the intra-segment error to match to obtain the segment matching result;
[0030] (4) Preserve the model through local-global commutativity, which includes segment-related descriptor constraints and segment-related operator commutativity constraints of geometric objects, uses segment matching information, and outputs point matching results.
[0031] The present invention firstly realizes the sub-shape segmentation of the geometric model based on the den...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com