

Self-adaptive cruise control method for electric automobile
A technology of adaptive cruise and control methods, applied in electric vehicles, control drives, control devices, etc., can solve problems such as increased energy consumption, decreased mechanical life, and no consideration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0086] The technical solution of the present invention will be further elaborated below in conjunction with the accompanying drawings.
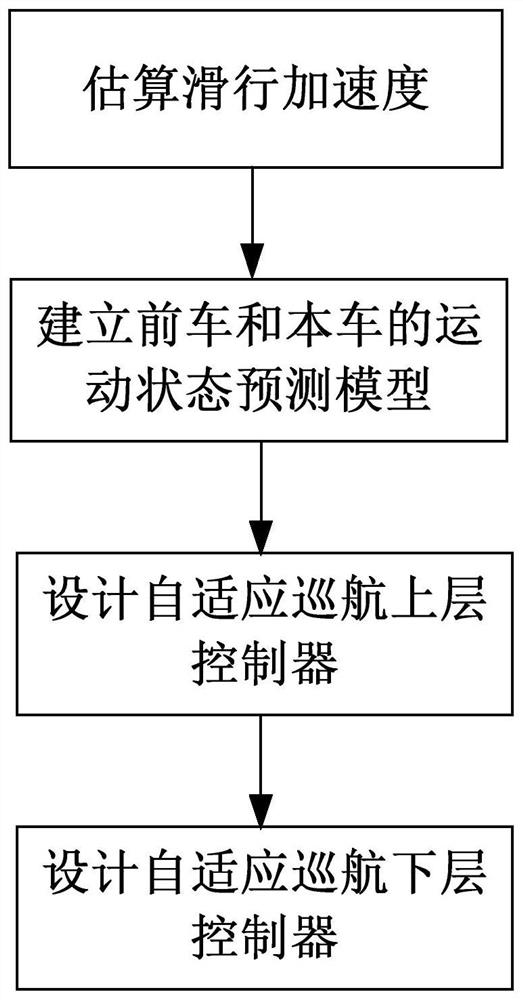
[0087] combine figure 1 , the invention provides a method for adaptive cruise control of an electric vehicle, the steps of which are:
[0088] Step 1: Estimating the sliding acceleration by using the recursive least squares algorithm with multiple forgetting factors. The specific steps of coasting acceleration estimation are as follows:
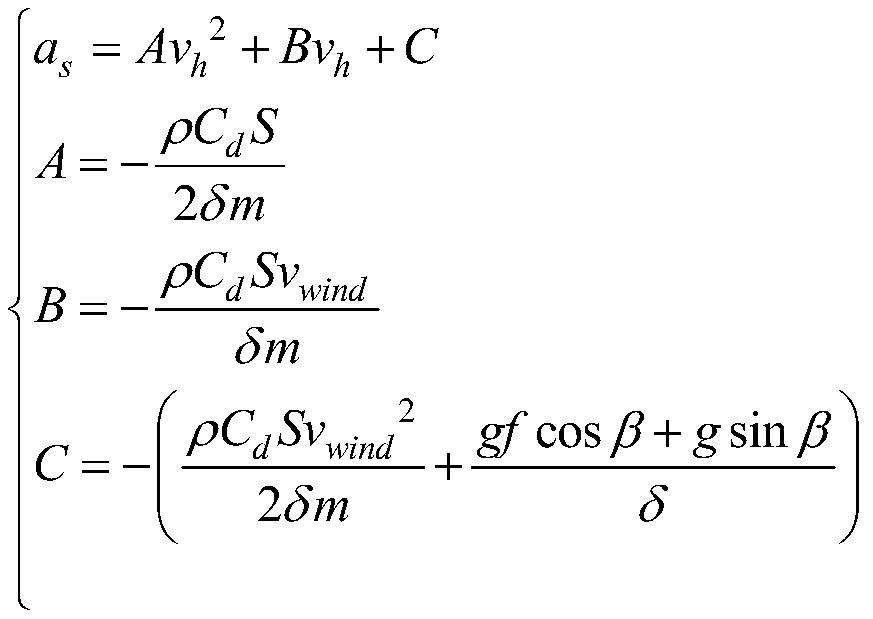
[0089] 1) Establish a mathematical model for coasting acceleration estimation
[0090] According to the vehicle driving equation, a mathematical model for estimating the sliding acceleration can be established, as shown in the following formula:
[0091]
[0092] In the formula: m is the mass of the vehicle; f is the coefficient of rolling resistance; β is the slope of the road; ρ is the air density; C d is the air resistance coefficient; S is the vehicle frontal area; v h is the vehicle speed; v wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More