

Point cloud 3D target detection method based on symmetric point generation
A target detection and symmetry technology, applied in the field of 3D target detection and automatic driving, can solve problems such as dependence and inability to detect objects, and achieve the effect of reducing detection difficulty and improving detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
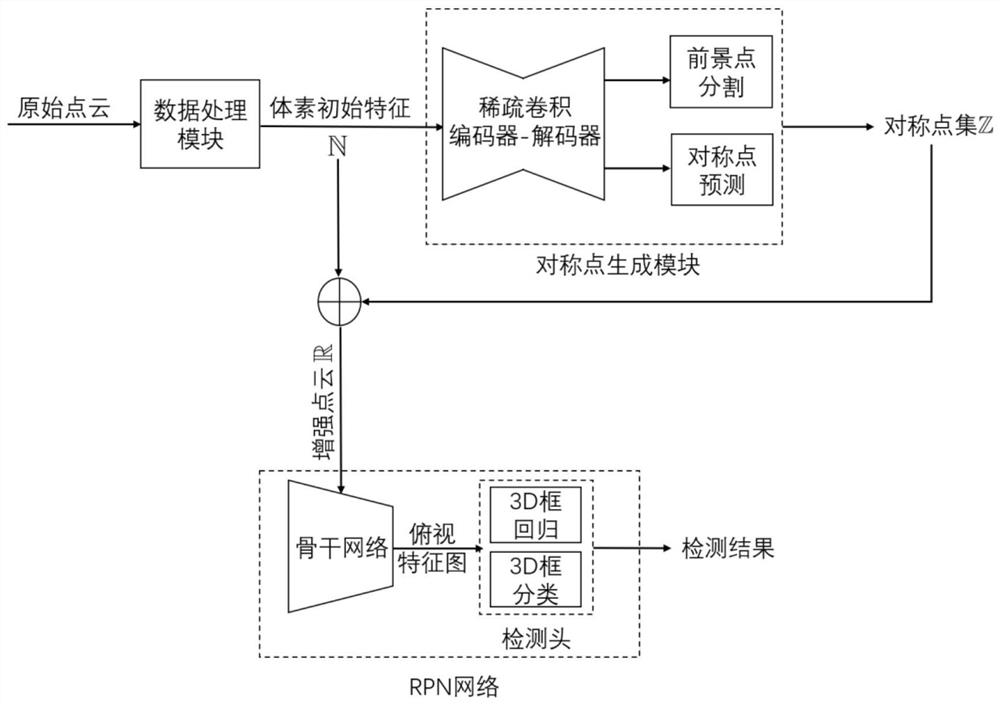
[0145] Step 1: Filter the point cloud and voxelize the detection space, calculate the input of the symmetry point generation module, that is, the initial feature of the voxel, generate the foreground point label, and generate the position offset label of the symmetry point relative to the foreground point;
[0146] In step 1, filter the point cloud and voxelize the detection space as follows:
[0147] The original point cloud is:
[0148]
[0149] in, Indicates the coordinates of the i-th point, Represent the x-axis coordinates, y-axis coordinates, and z-axis coordinates of the i-th point respectively, and filter out the points in the original point cloud that are not within the detection range, and the detection range is
[0150]
[0151] Then the filtered point cloud is where O j Indicates the coordinates of the jth point in the detection range space, respectively represent the x-axis coordinate, y-axis coordinate and z-axis coordinate of the jth point in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More