

Exoskeleton robot for lower limb paraplegia patient
An exoskeleton robot and patient technology, used in passive exercise equipment, equipment to help people walk, physical therapy and other directions, can solve the problems of secondary injury of patients, affecting the flow of blood in the lower limbs of the human body, and difficulty in balancing torque. Avoid joint dislocation, improve comfort and human-machine coordination, and avoid the effect of poor overall stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
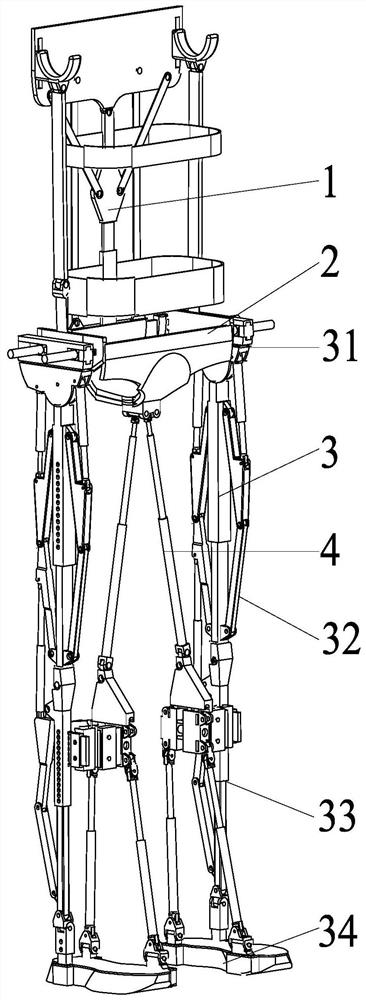
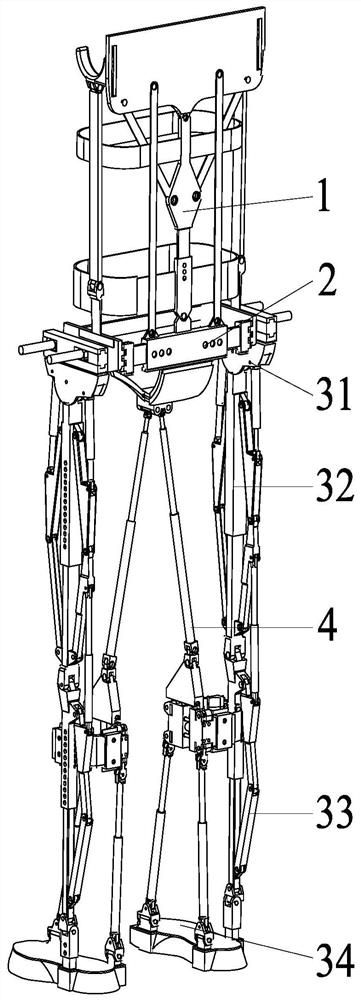
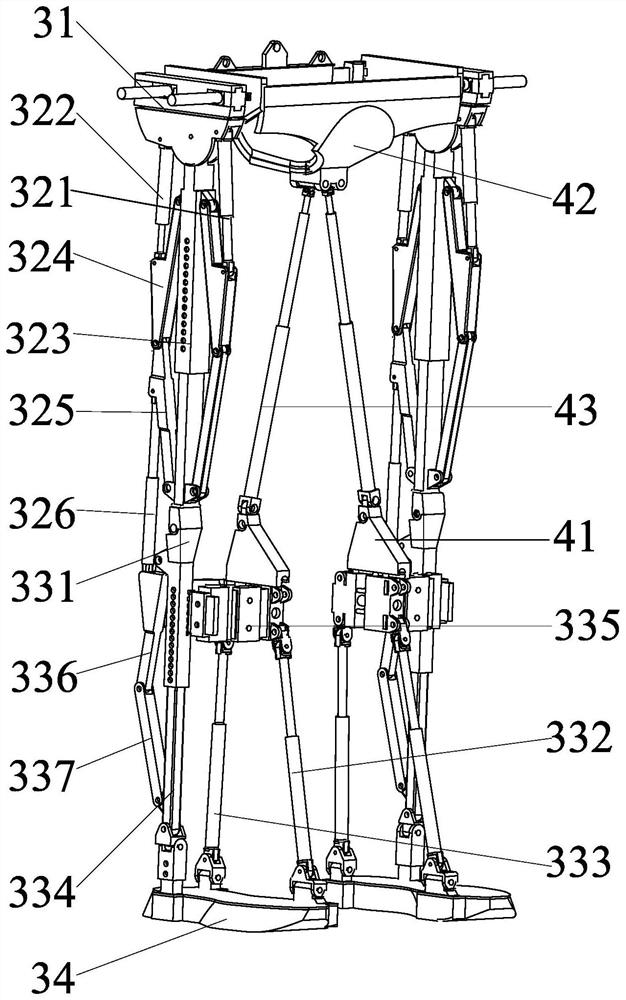
[0036] Such as Figure 1-Figure 10A specific embodiment of an exoskeleton robot for patients with lower limb paraplegia shown in the present invention includes a restraint assembly 1 arranged on the patient's upper torso, a hip assembly 2 mounted on the restraint assembly 1, and a hip assembly symmetrically installed Lower limb rehabilitation mechanism 3 and leg support mechanism 4 on 2; buttock assembly 2 includes buttock support 21, buttock connecting piece 22 installed on the buttock support 21 and crotch support pad installed on the hip support 21 and buttock connecting piece 22 23 ; the lower limb rehabilitation mechanism 3 includes a hip joint assembly ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More