

BiLSTM-based weekly vehicle lane change intention prediction method
A prediction method and intent technology, applied in neural learning methods, road vehicle traffic control systems, instruments, etc., can solve the problems of simple target feature detection and poor practicability, and achieve the goal of improving detection accuracy and efficiency and improving prediction capability, and the effect of improving safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following is attached Figure 1-6 , the present invention is described in further detail.
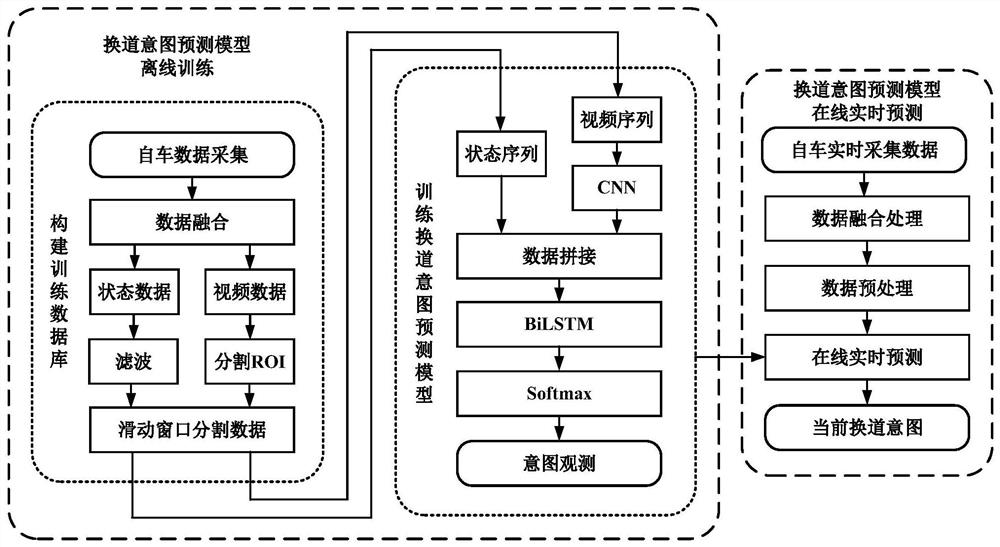
[0027] Such as figure 1 As shown, it is a flow chart of the lane-changing intention prediction method of the present invention, which consists of two parts: offline training and online real-time prediction of the lane-changing intention prediction model, including the following steps:
[0028] Step 1: The offline training process of the lane-changing intention prediction model is divided into two parts: building the training database and training the lane-changing intention prediction model. The implementation steps are as follows:
[0029] Step 1.1: The construction of the training database of the present invention is through the collection and processing of large-scale real driving scenes.
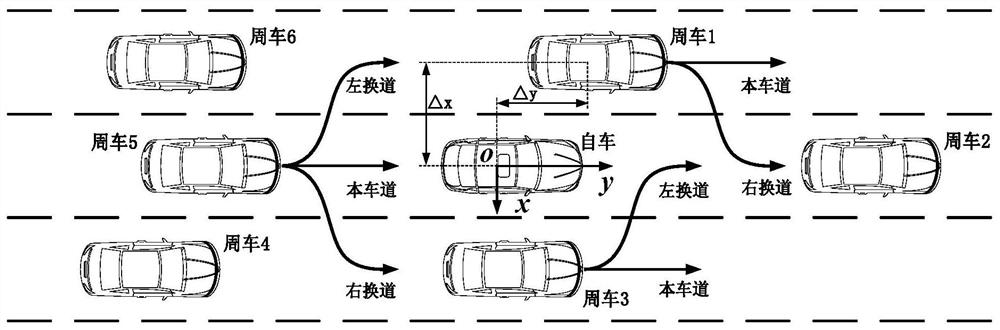
[0030] Step 1.1.1: Self-vehicle data collection: a typical data collection such as figure 2 As shown in Fig. 1, the self-vehicle uses on-board sensors such as cameras, millimeter-wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More