

Exoskeleton motor system control method based on uninjured side limb electromyographic signals
An electromyographic signal and control method technology, which is applied in medical science, passive exercise equipment, diagnosis, etc., can solve the problems of difficult adaptive control of exoskeleton motor system parameters, and the response speed is not easy to synchronize, so as to achieve autonomous recovery. , Good active rehabilitation training, reducing the effect of external common mode noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the content of the present invention more clearly understood, the present invention will be further described in detail below based on specific embodiments and in conjunction with the accompanying drawings.
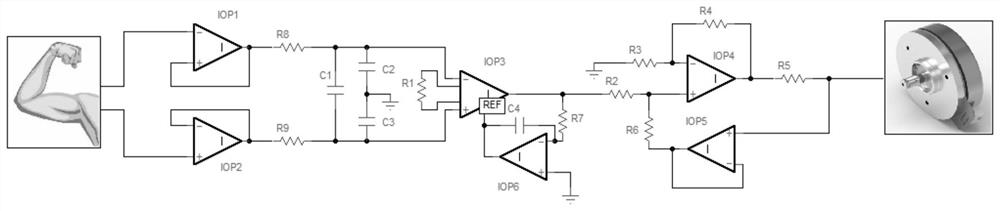
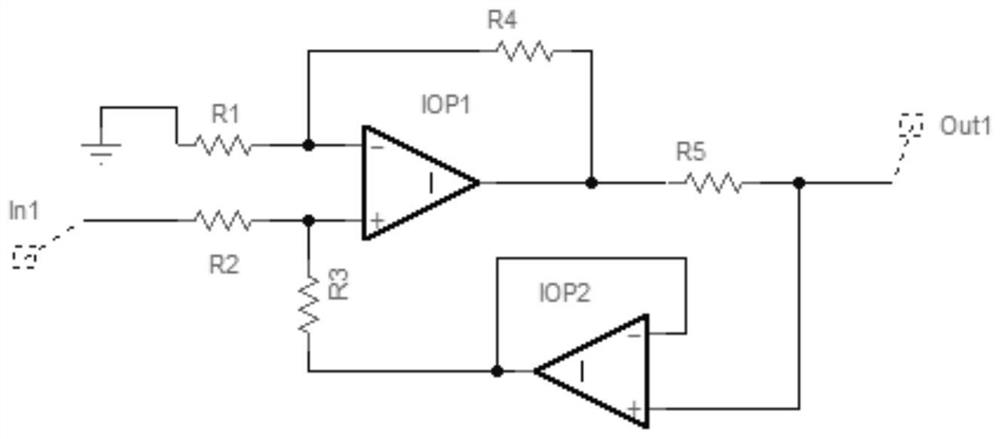
[0019] Such as Figure 1-2 Shown, a kind of exoskeleton motor system control method based on healthy side limb electromyographic signal, described system comprises voltage follower (IOP1, IOP2), low-pass filter (C1, C2, C3, R8, R9), instrument Amplifier (IOP3), high-pass filter (IOP6, R7, C4) and voltage-current conversion circuit (R2, R3, R4, R5, R6, IOP4, IOP5), and the above components or circuits are connected in series;
[0020] The method comprises the following specific steps:
[0021] 1) Paste the surface detection electrodes on the body surface skin of the relevant muscles, and collect the corresponding EMG signals generated on the muscles related to the movement of the healthy side of the patient;
[0022] 2) Through the signal generati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More