

Multifunctional fire-fighting robot suitable for high altitude and operation method thereof
A fire-fighting robot, multi-functional technology, applied in fire rescue, transportation and packaging, vehicle parts, etc., can solve the problems of high-level fire rescue operations that cannot be performed for a long time, intelligent operation, and limited operation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
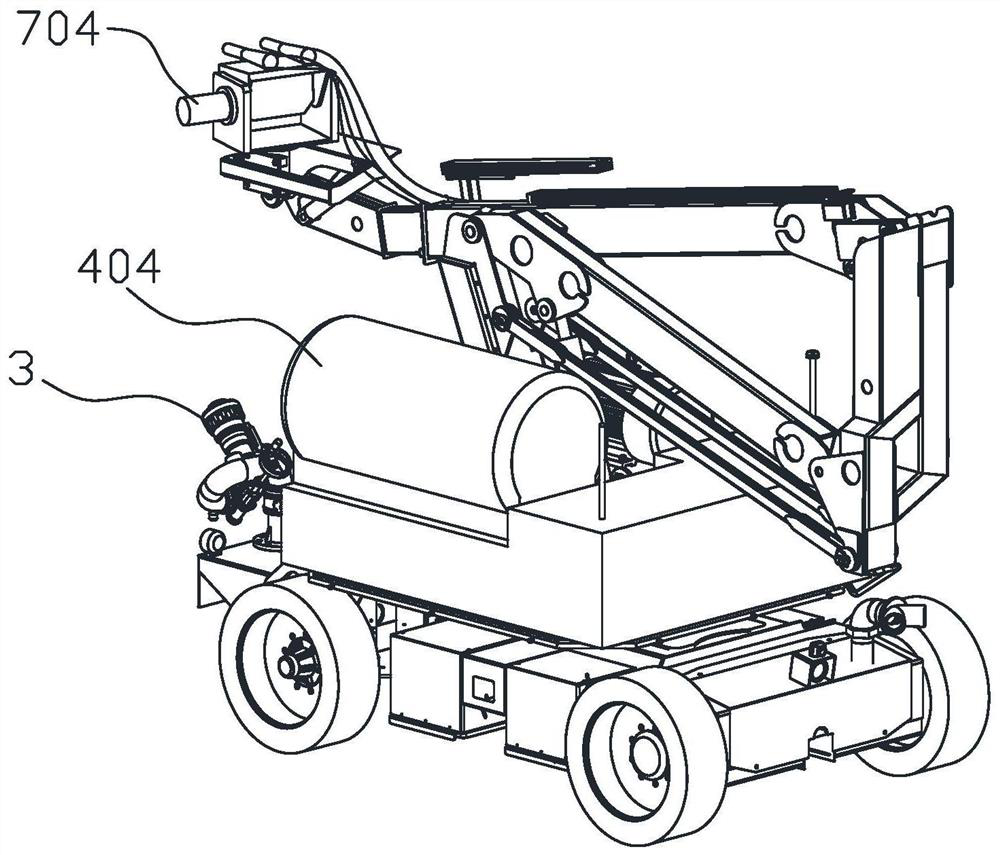
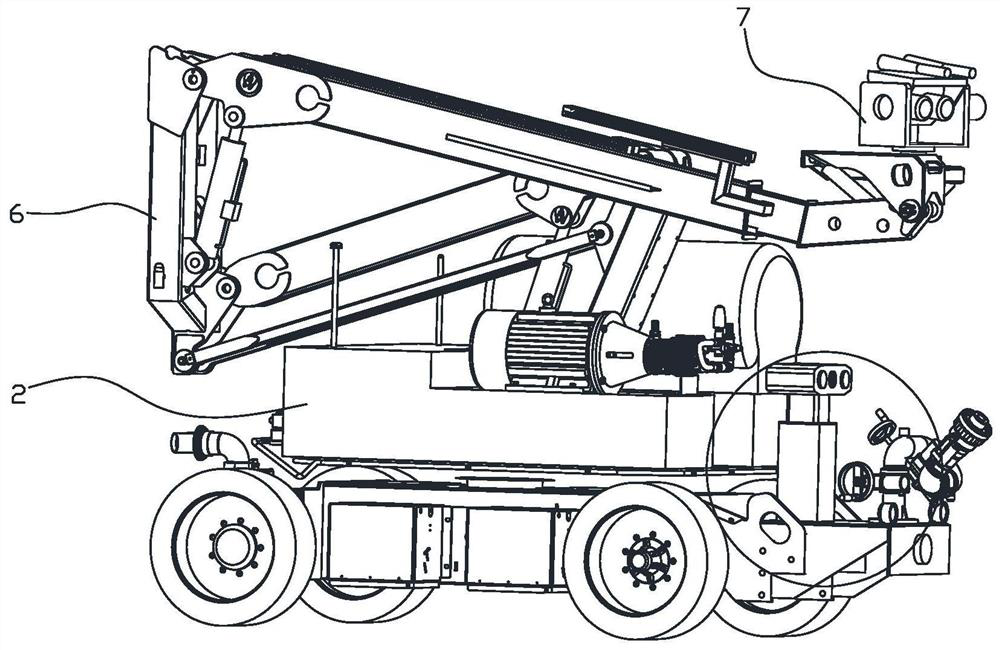
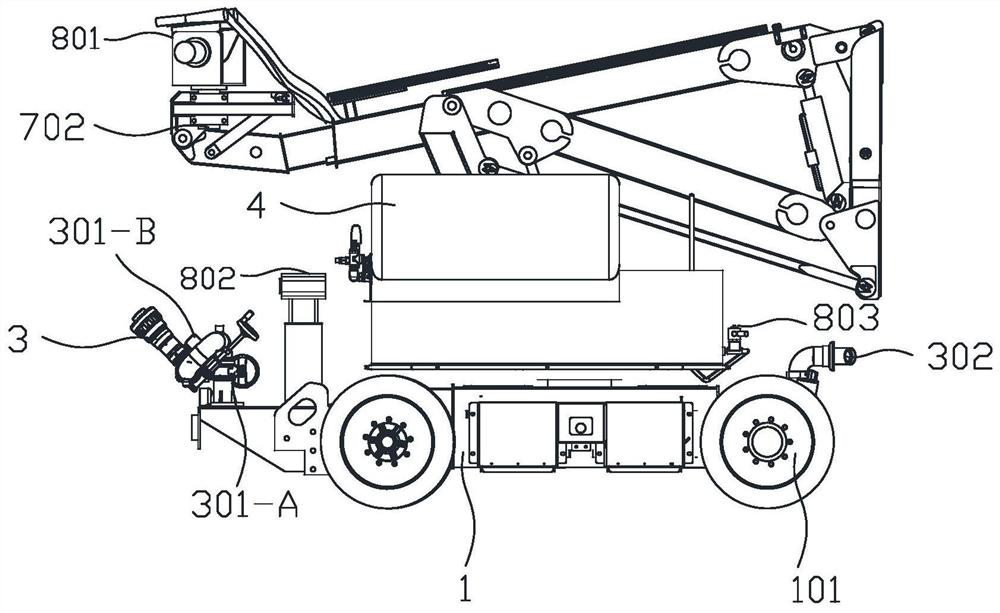
[0083]With the accompanying drawings, a multi-function fire extinguishing robot suitable for high altitude, including moving chassis 1, carries the body 2, water injection fire extinguishing system 3, dry powder fire extinguishing system 4, high pressure fine water mist fire extinguishing system 5, high-altitude lifting assembly 6, cloud Table assembly 7, observation sensing system 8, energy, communication, and control module 9.
[0084]Specifically, the moving chassis 1 realizes the power travel and steering drive of the robot, contains at least: the wheel assembly 101, the steering assembly 102, the power drive assembly 103, and the chassis frame 104. The wheel assembly 101 is coupled to the front and rear ends of the chassis frame 104 by steering assembly 102. The steering assembly 102 adjusts the angle of the chassis upper ring assembly 101, thereby realizing the steering of the robot; the power drive assembly 103 achieves the power promotion of the chassis assembly 101, and then r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More