

Unmanned aerial vehicle attitude measurement method based on strapdown inertial navigation and Beidou satellite navigation system
A Beidou satellite and navigation system technology, applied in the field of unmanned aerial vehicles, can solve the problem of increased attitude information error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
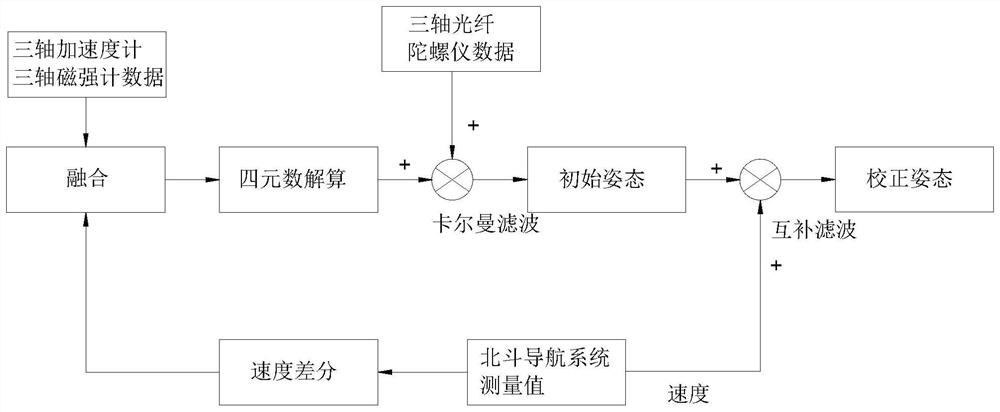
[0069] After calibration and error compensation for the three-axis fiber optic gyroscope, use the quaternion Runge-Kutta method to calculate and update the attitude of the three-axis fiber optic gyroscope; select the four elements of the attitude as the state vector:
[0070]
[0071] Construct the pose quaternion transformation matrix:
[0072]
[0073] The initial attitude angle expressed by the quaternion is:
[0074] θ 0 =arcsin(2(q 2 q 3 +q 0 q 1 ))
[0075]
[0076]
[0077] At the same time, the three-axis accelerometer measures the three-axis acceleration in the motion state of the drone:
[0078] a b =[a x , a y , a z ]
[0079] The three-axis magnetometer measures three magnetic field components in the motion state of the multi-rotor UAV:
[0080] m b =[m x ,m,m z ]
[0081] Using the third-order optimal differentiator to differentiate the velocity measurement value of the Beidou satellite navigation system to obtain the linear motion acce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More