

Finite time control method for variable-load quadrotor unmanned aerial vehicle
A four-rotor unmanned aerial vehicle, limited time technology, applied in the direction of non-electric variable control, attitude control, control/regulation system, etc., can solve problems that cannot meet the needs of practical applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
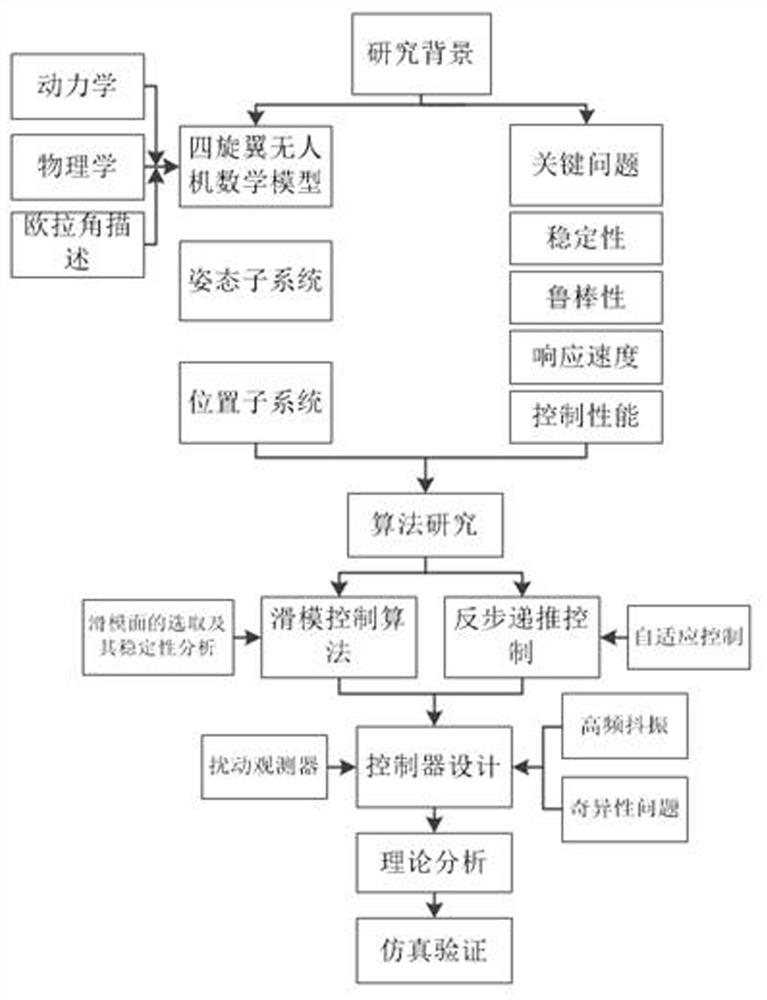
[0103] as attached figure 1 Shown, the present invention comprises the steps:
[0104] (1) Mathematical model of quadrotor UAV
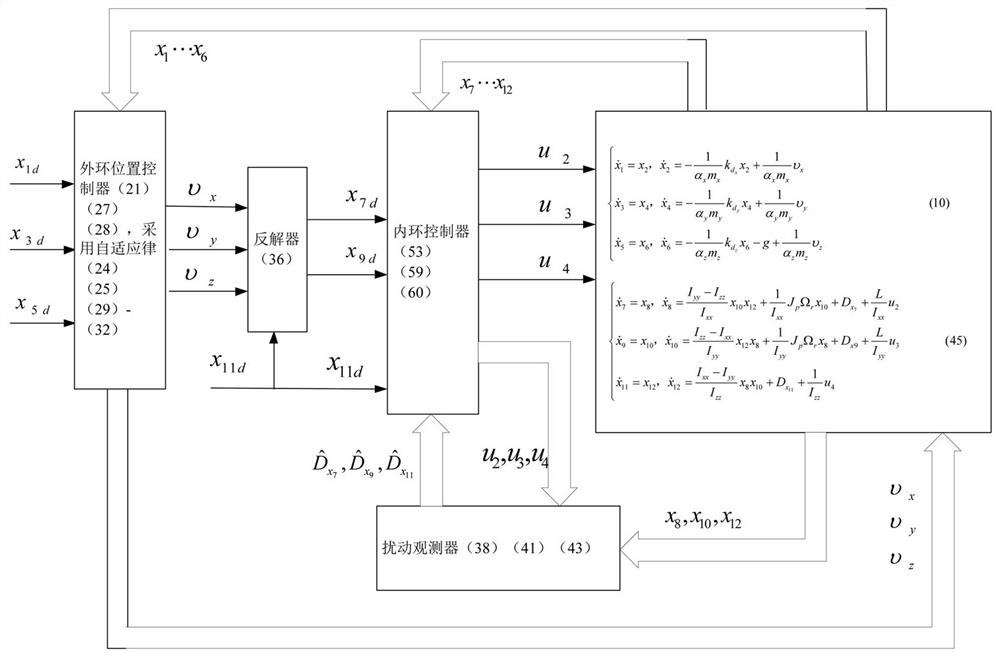
[0105] First, by searching relevant literature and combining with reality, the disturbance and uncertainty factors encountered during the flight of the quadrotor UAV are analyzed, and the position subsystem of the quadrotor UAV is established according to the relevant dynamics, physics, and Euler angle descriptions. and the mathematical model of the attitude subsystem. with vector(x,y,z) T and (φ,θ,ψ) T The position information and attitude information of the quadrotor UAV are described respectively. The mathematical model of the position subsystem is expressed as a state equation in the form of:
[0106]
[0107] where the state variable Mass compensation coefficient α i (i=x, y, z) is a constant for online estimation of the load variation of the quadrotor UAV. m x =m y =m z Indicates the mass of the drone body. is the drag coeffici...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More