

Biped robot leg structure based on five connecting rods
A biped robot and five-link technology, applied in the field of robotics, can solve the problems of lack of biped robots, large energy loss, large leg inertia, etc., to improve energy utilization, improve load capacity, and reduce leg inertia. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below with reference to the accompanying drawings and examples.
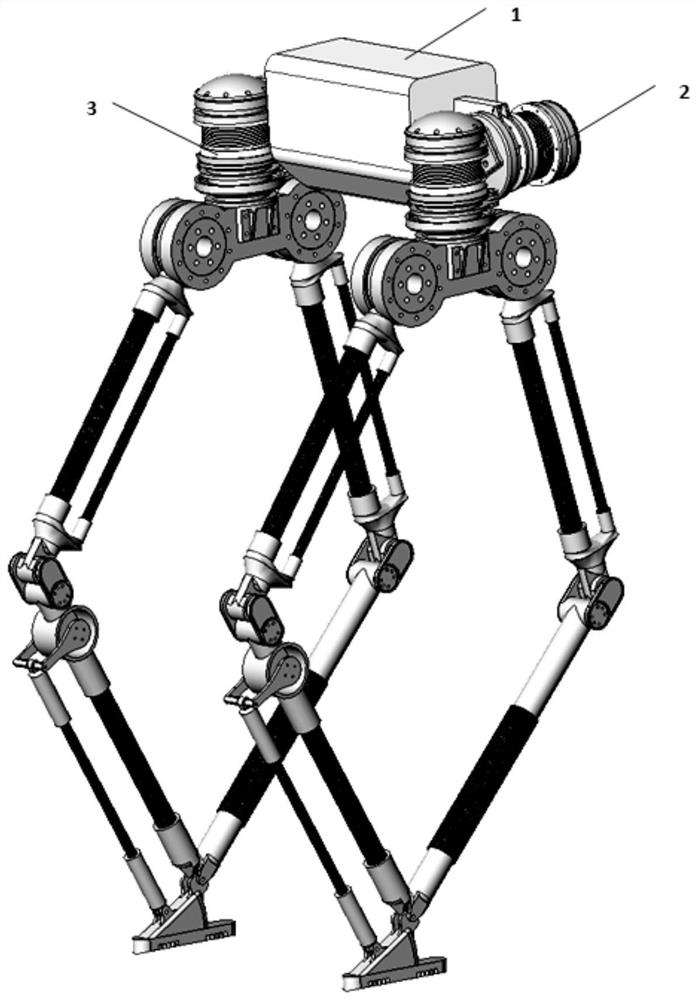
[0040] The present invention provides a biped robot leg structure based on five linkages, see figure 1 The fuselage 1 is provided with two sets of hip joint motor assemblies, and the hip joint motor assemblies are connected to the legs of the five-link structure.
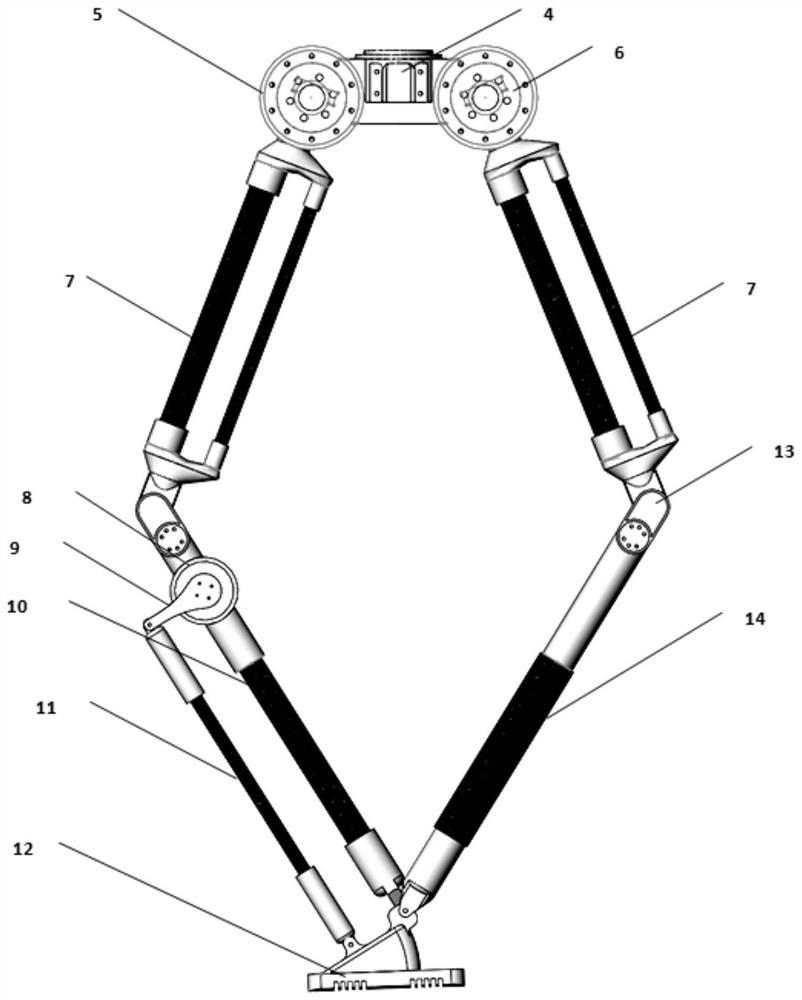
[0041] Among them, the hip joint motor assembly is a two-degree-of-freedom rotation system that provides the hip joint roll degree of freedom and route freedom, and the output shaft of the two-degree-of-freedom rotation system is fixedly connected to the frame 4 of the five-link structure. As shown in the figure, in this embodiment, the hip joint motor assembly includes a hip joint roll degree of freedom motor 2 and a hip joint yaw degree of freedom motor 3 . The two hip joint rolling degree of freedom motors 2 of the two sets of hip joint motor assemblies are fixed on the left and right sides ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More