

Ship intelligent control system and ship body control method
A hull and ship technology, applied in the field of ship intelligent control system, can solve problems such as high environmental requirements, poor operating experience, and inability to determine the direction of the ship, and achieve the effect of improving the sense of experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
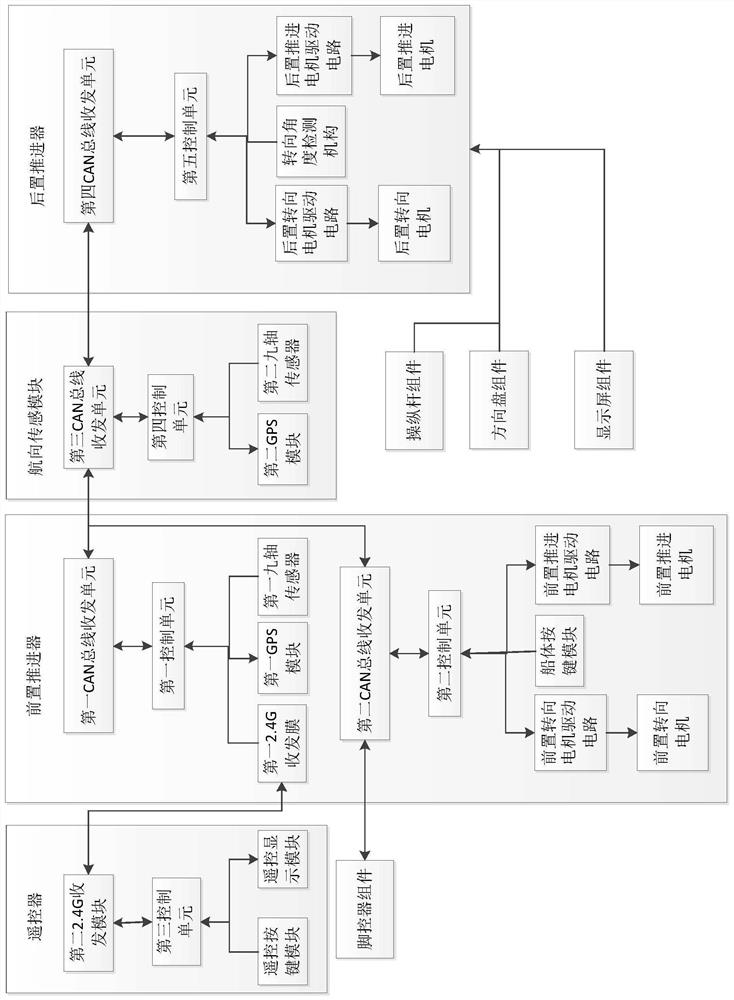
[0025] Such as figure 1 The shown ship intelligent control system includes a front thruster arranged on the front side of the hull, a rear thruster arranged on the rear side of the hull, and a course sensing module installed on the rear side of the hull, wherein
[0026] The front thruster includes: a first CAN bus transceiver unit, a second CAN bus transceiver unit, a first control unit, a second control unit, a first 2.4G transceiver module, a first GPS module, a first nine-axis sensor, The front steering motor, the front steering motor drive circuit, the front propulsion motor, the front propulsion motor drive circuit and the hull button module, wherein the first GPS module, the first nine-axis sensor and the first 2.4G transceiver module are all compatible with the The first control unit is connected in communication; the first CAN bus tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More