

Laser radar and camera combined calibration method
A lidar and joint calibration technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as low accuracy and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
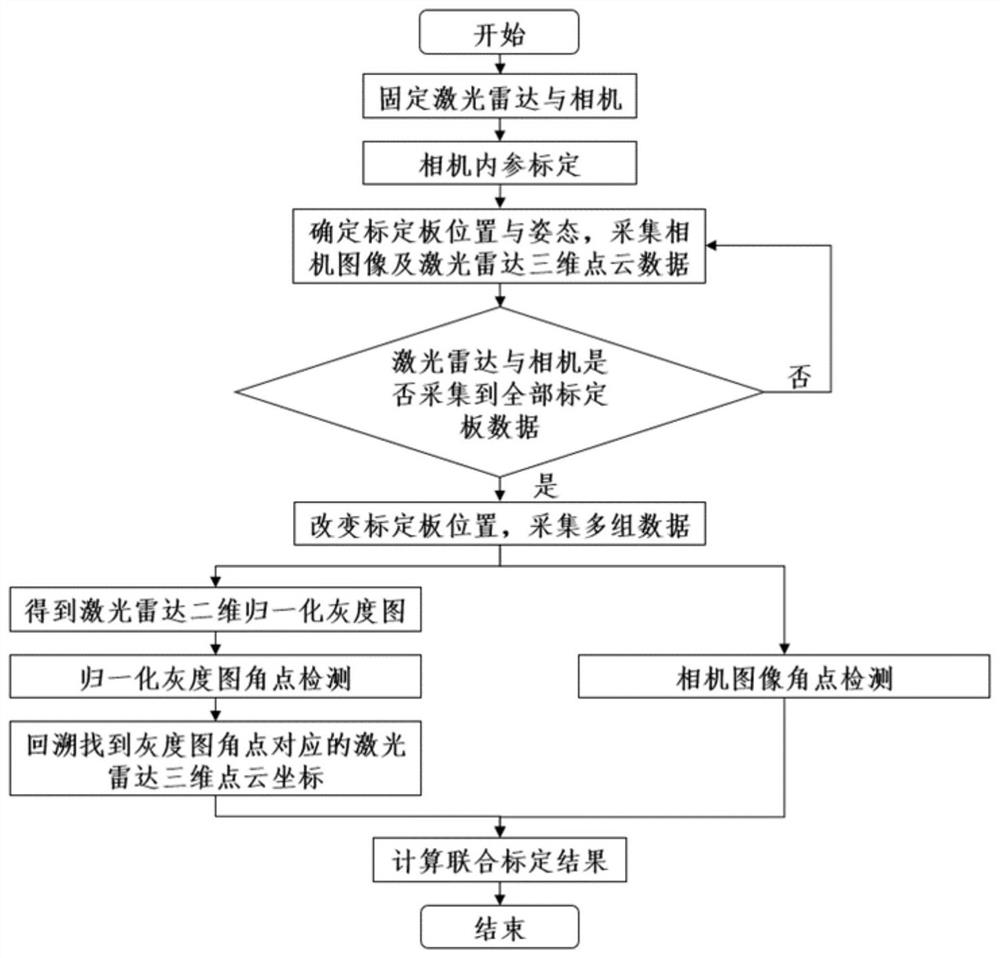
[0046]Combinefigure 1 , A laser radar is combined with the camera, the steps are as follows:
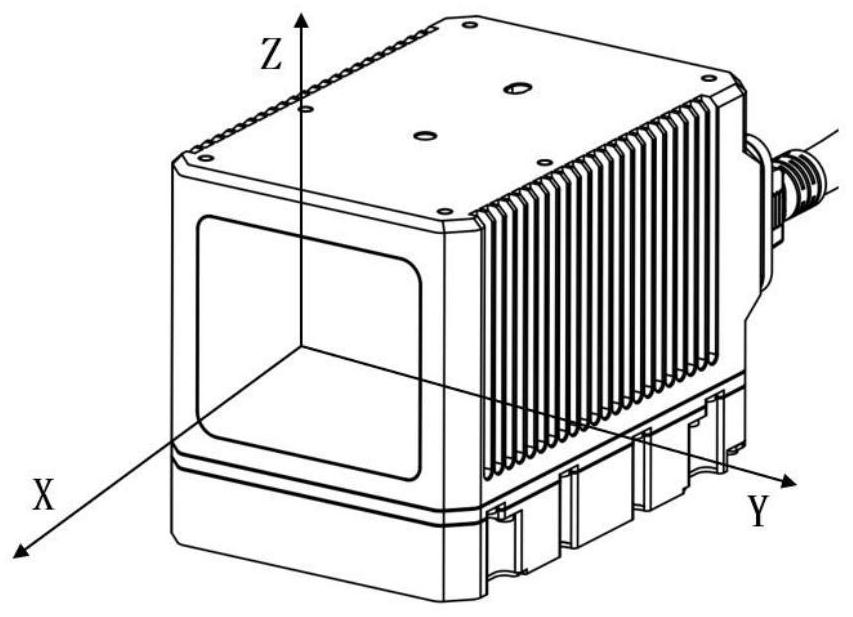
[0047]Step 1: Secure the laser radar to the same side in the same side toward the same direction, and the laser radar is in the camera-absorbing view of the camera to more than 50%.
[0048]Step 2: Calibrate the camera to get the cameraflyx, FyIndicates the camera focal length, Cx, CyIndicates the offset of the camera optical axis on the image coordinate system.
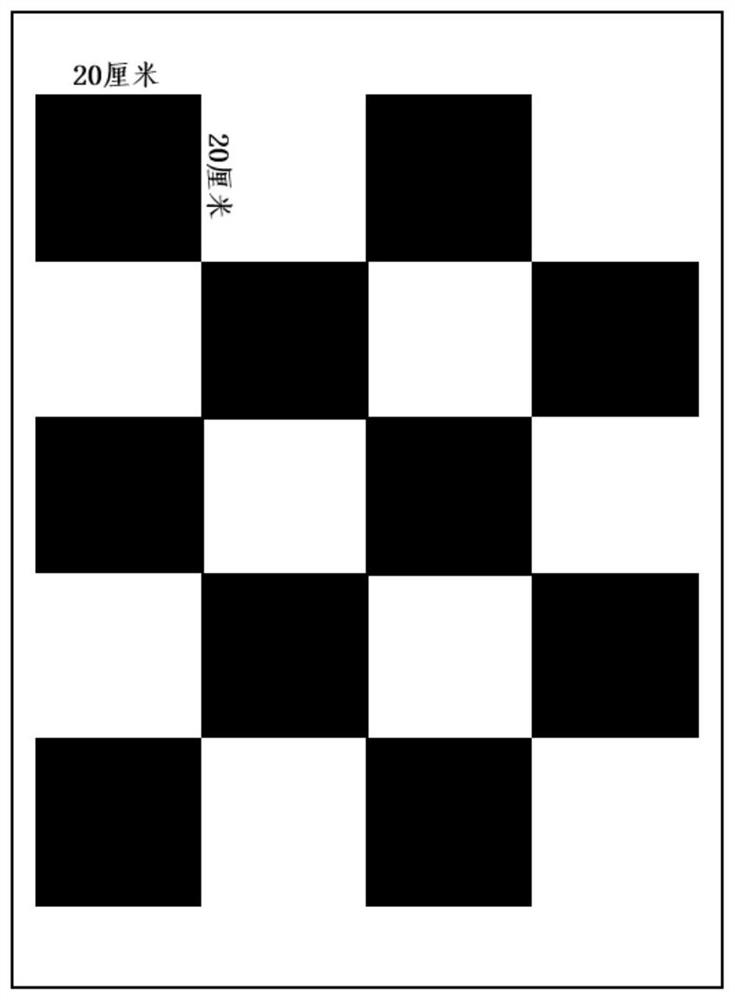
[0049]Step 3: In order to be able to fully collect the camera image and the three-dimensional point cloud data at different locations at different positions in the zone, A, B, C, D, E, F, G, H, I are selected in the combination of view. Total 9 different locations (such asFigure 4 , Arrangements in concentric circles of different radii). At each location, the camera collects one frame image data, and the laser radar collects 20 seconds three-dimensional point cloud data. Among them, the chessboard lattice usedfigure 2 As shown, in order t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More