Mechanical arm force feedback system and method, control method and control terminal
A feedback system and feedback control technology, applied in the field of medical devices, can solve the problems of difficult control, excessive volume and high cost, and achieve the effect of expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
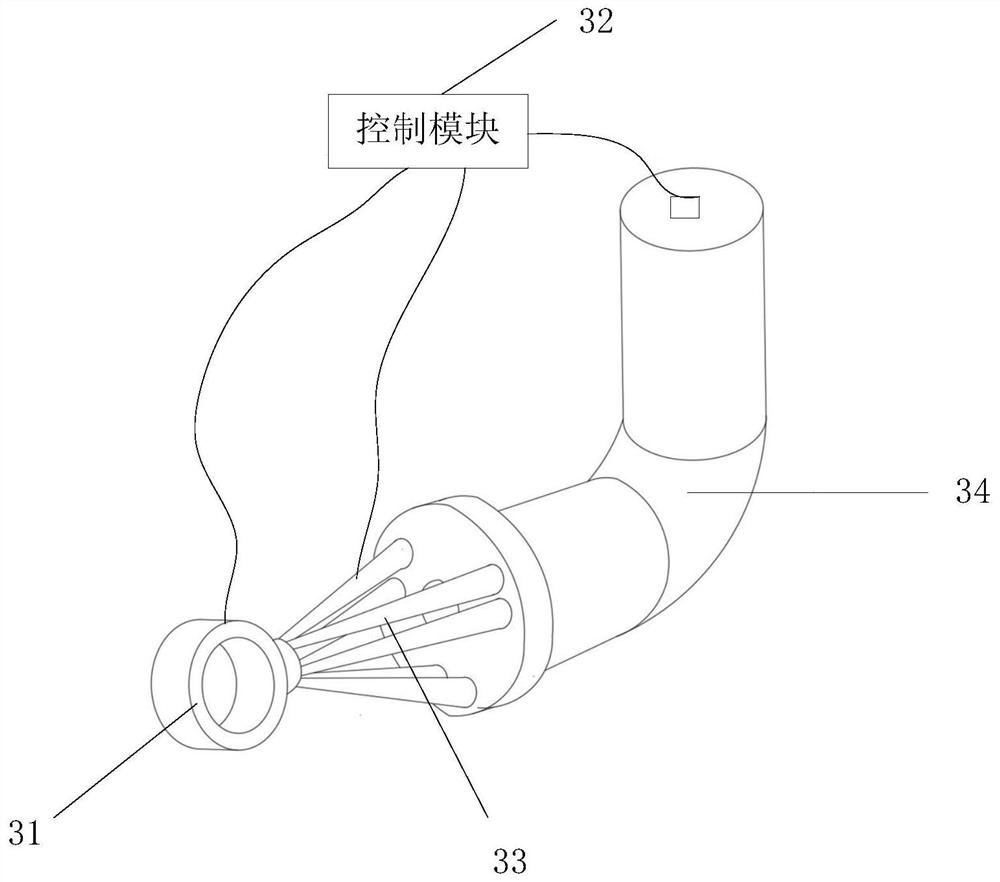
[0054] Embodiment 1: An external mechanical arm force feedback system for assisting surgery, such as image 3 A schematic diagram of the system is shown.
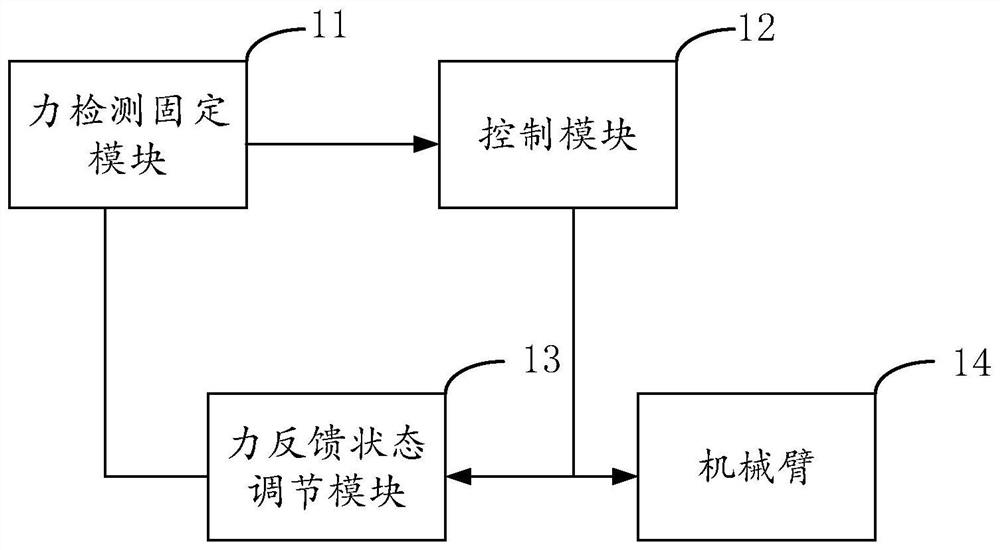
[0055] The system includes: a force detection fixed ring 31 , a main control system 32 , a force feedback adjustment mechanism 33 and a mechanical arm 34 .
[0056] Wherein, the force feedback adjustment mechanism 33 is respectively connected with the force detection fixed ring 31 , the main control system 32 and the mechanical arm 34 , and the force detection fixed ring 31 is connected with the main control system 32 . The force detection fixing ring 31 is used to fix the upper arm of the operator and collect the force application data of the operator and transmit it to the main control system 32, so that the main control system 32 can judge whether the operator is in the state of voluntary force application through an algorithm. The end of the mechanical arm 34 is provided with an electrical interface for direct connecti...
specific Embodiment
[0059] Such as Figure 4 A schematic flowchart showing a force feedback method of a mechanical arm in an embodiment of the present invention.
[0060] The methods include:
[0061] Step S41: Judging the operator's force application state according to the received force application data collected by the force detection and fixing module, wherein the force application state includes: an active force application state and a non-active force application state.
[0062] Optionally, judge the operator's force application state according to the received force application data collected by the force detection and fixing module, wherein the force application state includes: an active force application state and a non-active force application state; wherein, The force application data is the force application data of any part of the surgeon, which is not limited in this application; for example, the force application data at the wrist.
[0063] Optionally, the force detection fixing m...
Embodiment 2
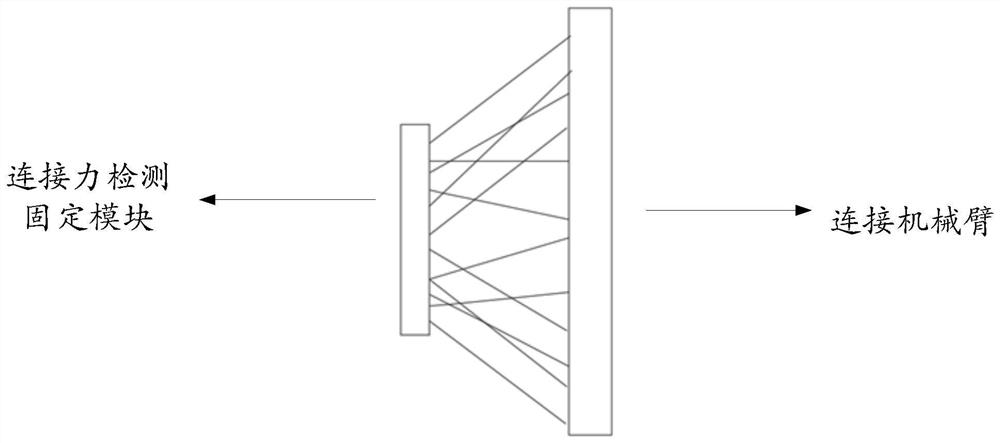
[0072] Embodiment 2: The method for the force feedback of the plug-in mechanical arm for assisting surgery, such as Figure 5 A schematic diagram of the system is shown.
[0073] The method includes: fixing the wristband to collect the force application data of the operator; the control system judges the force application status of the operator based on the force application threshold value received by the force detection and fixing module, that is, whether it is in the Judging the state of voluntary force application; if the operator is in the state of voluntary force application, the force feedback adjustment mechanism will be activated and unlock the braking mechanism of the mechanical arm; if the operator is in the state of involuntary force application, the force feedback adjustment mechanism will be activated The mechanism keeps locked, so that the mechanical arm also maintains the braking state synchronously, so that the mechanical arm can hover while maintaining the or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com